



Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
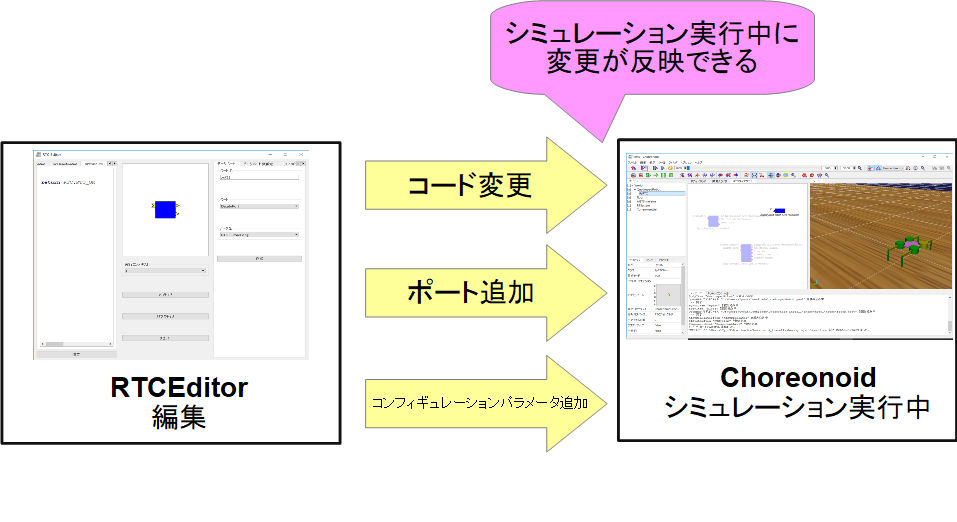
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
Kubernetes を利用した RTC 開発フレームワーク
概要
クラウドをサービスを構築するために使われるクラスタ構築ツールである Kubernetes を活用し、 ロボットシステム開発・運用を効率化する方法を示します。 RTC の開発だけでなく、RTC の PC への配置・起動に関する運用面での効率化にも貢献します。
本文
https://github.com/r-kurose/rtm_k8s/blob/master/index.md