Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
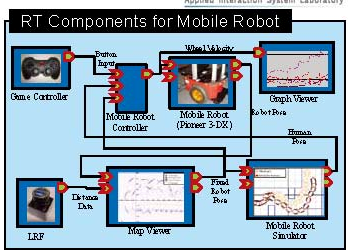
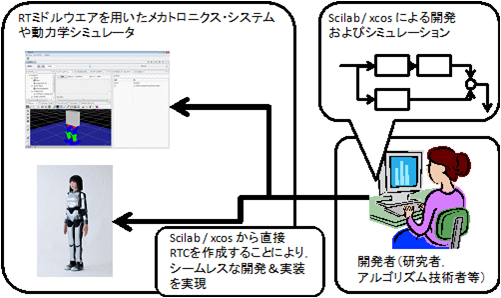
移動ロボットのネットワーク化と制御用RTコンポーネント
概要
本コンポーネントはActivateすることによって,UDPでブロードキャストされている環境中のロボットの状況を受信し,接続するロボットを選択することが可能である.接続後はTCPによるソケット通信で目標速度・角速度を送信し,オドメトリの値を受信する.
特徴