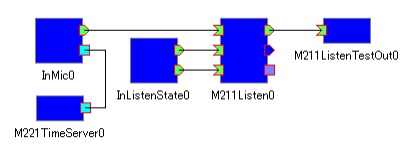
発話区間推定コンポーネントは、入力された音声波形データ/顔特徴点情報を 元に発話区間情報を生成、発話区間情報付き音声波形データを出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
音声認識コンポーネントは入力された音声波形データを認識し 文字列で発話内容を出力します。
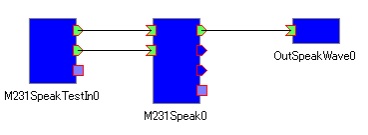
音声合成コンポーネントは入力された文字列から 音声波形ファイルを生成し、出力します。
顔動作推定コンポーネントは入力された動画(連続した静止画)から 人物の顔を検出し、顔の向き、視線、目口開閉度を出力します。
個人同定コンポーネントは入力された画像から人の顔を検出し、 画像に含まれる人の個人識別IDを出力するコンポーネントです。 個人同定コンポーネントは画像に含まれる人の顔の特徴を コンポーネント内部のデータベースに登録し、新しくデータベース に登録された人物に対して自動的に新しい個人識別IDを割り当てます。 2回目から入力された画像の顔の特徴とデータベースに登録された 顔の特徴とが一致したら、同一の個人識別IDを出力します。
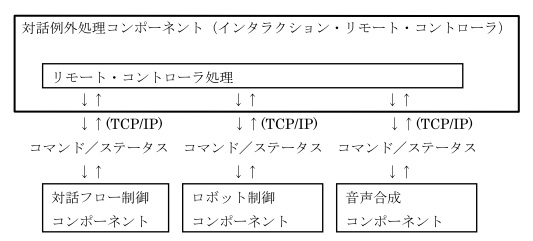
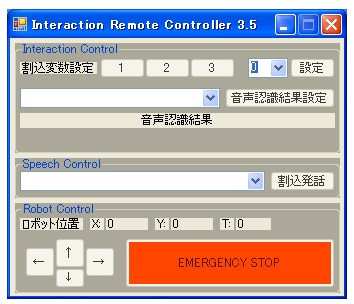
人との対話時に、あらかじめ準備された対話フローに無い例外的な 処理を行いたい場合に、オペレーターが遠隔制御で手動操作するための GUIを持つモジュールで、対話フロー制御RTCや他のRTCモジュールに TCP/IPで接続し、遠隔制御コマンドを出力してロボットを操作します。
株式会社 国際電気通信基礎研究所 知能ロボティクス研究所 次世代ロボット知能化プロジェクト担当 〒619-0288 京都府相楽群精華町光台2-2-2 URL :http://www.irc.atr.jp/ptRTM/RTM-j.html email:irc-contact@atr.jp
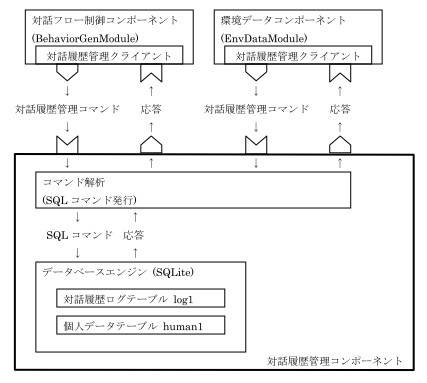
上位層からのコマンドにより、対話履歴データベースを検索・追加・更新・削除し コマンド実行結果を応答として返します。 また、ビヘイビア実行のログを記録する機能があります。
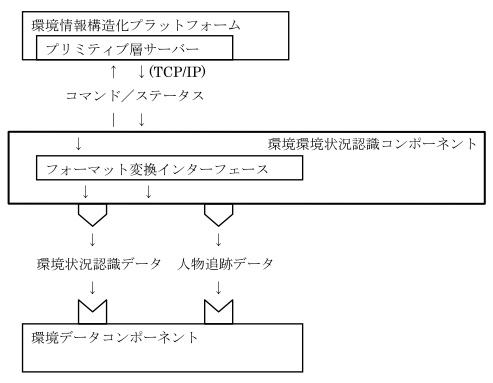
環境情報構造化プラットフォームから得られる、人々とロボットの位置や 「ロボットに近づく」「ロボットから離れる」「ある程度の時間以上ロボットの 近傍にいた人物が離れる」などの状況の認識結果を、外部RTCに出力します。
各種センサからのセンサデータや、外部RTCモジュールより得られた 環境データを統合し、上位層モジュールの要求に応じて出力する。
ロボットの機能・用途に応じて予め用意されたコンテンツを管理し 対話者の属性や状況に応じた対話コンテンツを選択・実行する RTコンポーネントです。 特徴1:対話履歴やセンサ等から得られた対話者の属性や情報に応じて 対話の流れを切り替える機能 特徴2:対話コンテンツを管理し、対話の流れをデザインするためのGUI
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


発話区間推定モジュール
概要
発話区間推定コンポーネントは、入力された音声波形データ/顔特徴点情報を
元に発話区間情報を生成、発話区間情報付き音声波形データを出力します。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しくは、下記までご連絡をお願い致します。
連絡先
株式会社イーガー
新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田)
〒530-0047
大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F
Tel : 06-6360-2050
Fax : 06-6360-2051
E-mail: kubota@mail.eager.co.jp