このコンポーネントは、Basler社製GigEカメラ(aceシリーズ)1台を制御する 機能を有する。
下記ライブラリ、ツールを使用しています。 ●Basler社製 Pylon Driver
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
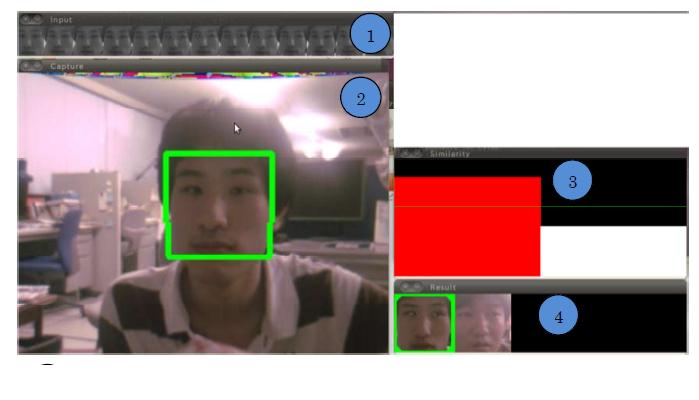
このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
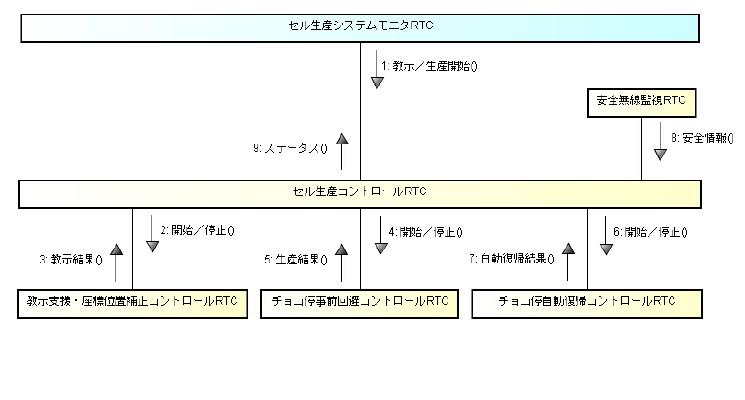
本RTコンポーネントは、ロボット制御セル生産システムの状態(生産中、 教示中、チョコ停中など)を作業者へ表示する機能を有する。
下記ライブラリを使用しています。 ●OpenCV 2.1.0
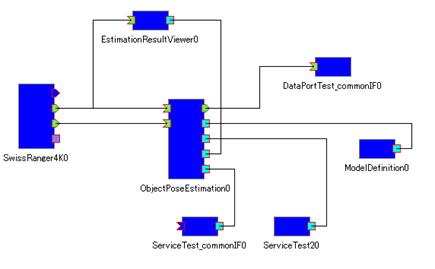
このコンポーネントはスイス MESA社製の3次元距離測定カメラ SwissRanger SR4000からのデータを基に机上の複数個の直方体物体と円筒物体の3次元空間上での位置と姿勢を推定するコンポーネントです。 2012年2月22日にコンポーネント本体とマニュアルを更新しました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
修正BSDライセンスを適用しています。 詳しくは、ドキュメントに同梱の"license.pdf"をご覧ください。
本コンポーネントの動作環境は、以下のとおりです。 ●画像認識ボード用組込Linux(富士通研究所様ご提供) ●OpenRTM-aist1.0対応画像認識ボード用RTM(セック様ご提供)
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


ace向けカメラ制御RTコンポーネント
概要
このコンポーネントは、Basler社製GigEカメラ(aceシリーズ)1台を制御する
機能を有する。
注意事項
下記ライブラリ、ツールを使用しています。
●Basler社製 Pylon Driver
ライセンス
Eclipse Public License v1.0を適用しています。
連絡先
IDEC株式会社
rtc_support@idec.co.jp
Download
ドキュメント/ソースコードは以下のURLから入手できます。
http://code.google.com/p/idec-rtcs/