本ページはRTミドルウェアコンテスト2013で発表予定のRTCページです。 レーザーレンジファインダを搭載した移動ロボット(Roomba)を用いて、自律的に地図を作るシステムを提供します。 このRTC群は、Kartoライブラリを用いたSLAMや経路計画、自己位置推定などの環境地図RTCと、北陽電気のレーザーレンジファインダ、iRobot社のRoombaを制御するRTCが含まれています。
地図システムのコンポーネント群全体について、再利用性を高めるため、データポートを使用し、標準の構造体を使用して設計・構成しています。 そのため、標準のデータ型を使用すれば、一部RTCを置き換える事も可能です。
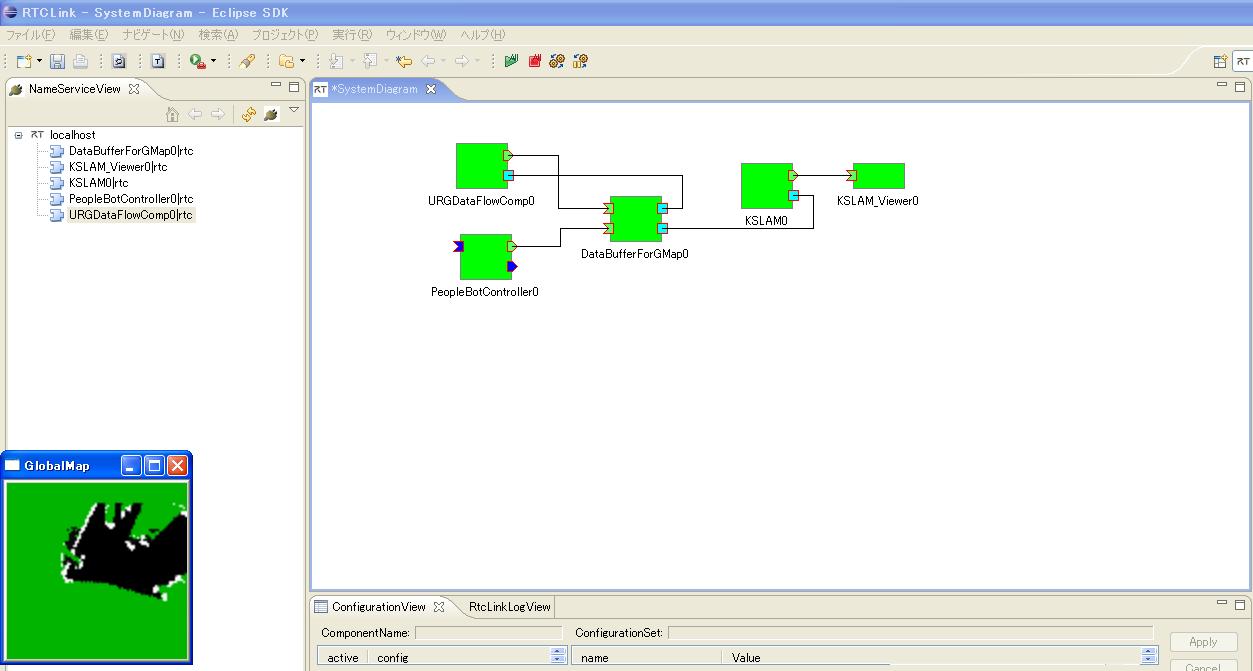
このコンポーネントは、独自手法の大域地図の生成・表示を行うコンポーネント群です。
下記ライブラリを使用しています。 ●OpenRTM1.0.0用では、OpenCV 2.1 ●OpenRTM0.4.x用では、OpenCV 1.0
修正BSDライセンスを適用しています。
奈良先端科学技術大学院大学 情報科学研究科 j-taka@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841
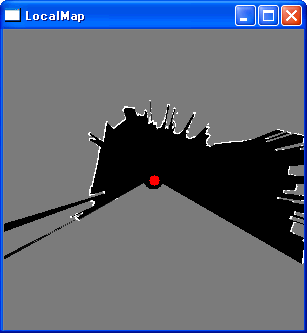
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

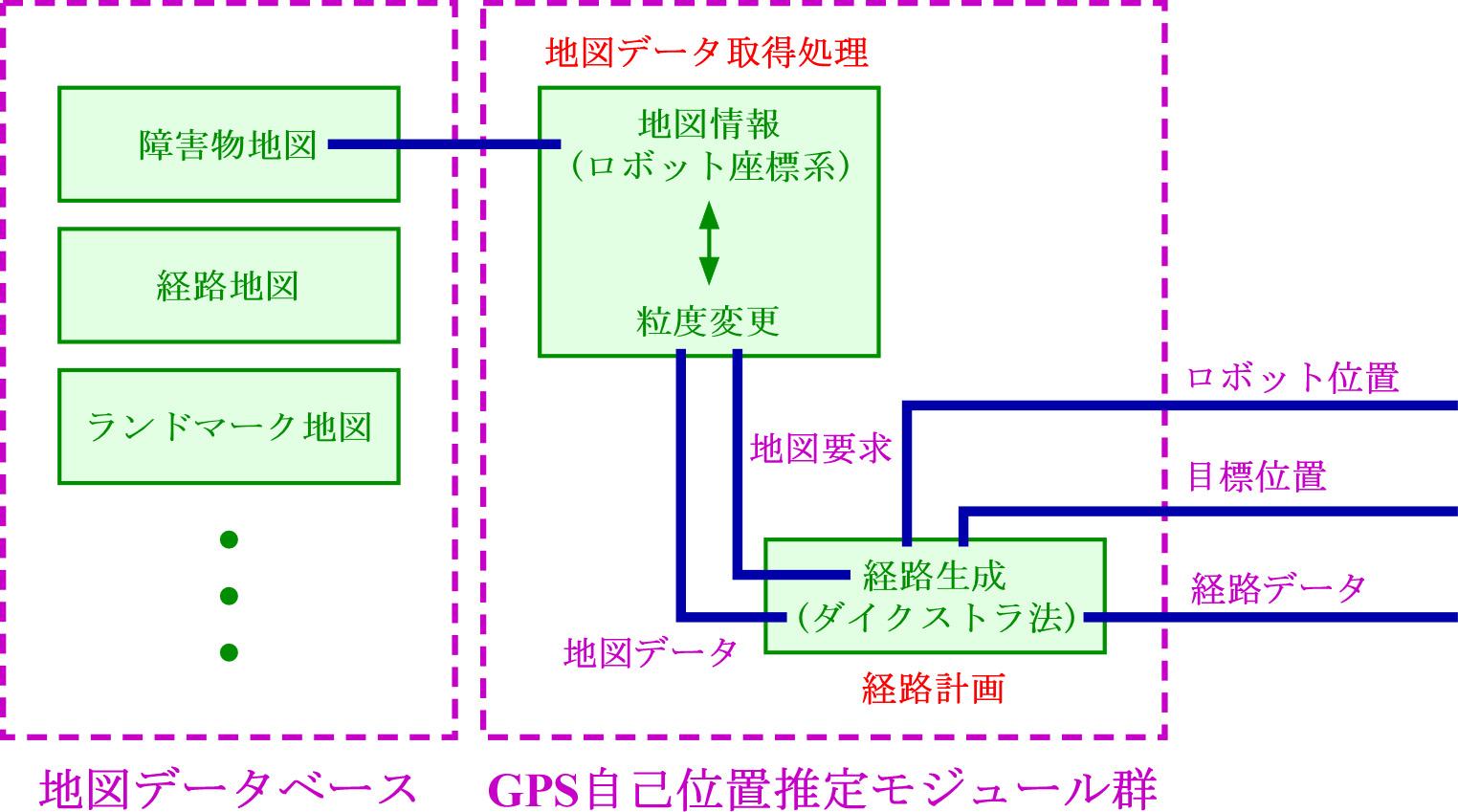
屋内地図モデルの簡易生成コンポーネント群
概要
特徴