対象人物の色ヒストグラム情報を記憶して、その人を追従する移動体向けの 速度指示値を生成するモジュール群。 人追従機能モジュール群) ・人(位置・距離)認識RTC (Ubuntu/Windows) ・人追従制御RTC (Ubuntu/Windows) ・カメラRTC (Ubuntu) ・レーザーレンジRTC (Ubuntu) ・ゲームパッドRTC (Ubuntu) ※詳細は解凍後のdocフォルダにあるpdfを参照ください。 V1.1にて以下のWindows版のRTCを追加しました。 ・人(位置・距離)認識RTC ・人追従制御RTC V1.2にて ・レーザーレンジRTC(URG)の更新 ・Activate/Disactivate時QTコマンド追加
セグウェイジャパン株式会社 E-MAIL robot@segway-japan.co.jp TEL 045-263-6151
来訪者の入館・退館における受付業務を主としたオフィスサービスを行うもの とする。 このシステムで行われるサービス内容は、表.サービス一覧に示すサービスに 分割されており各サービス毎及び、サービス連動での動作を可能とする。
【サービス 一覧】
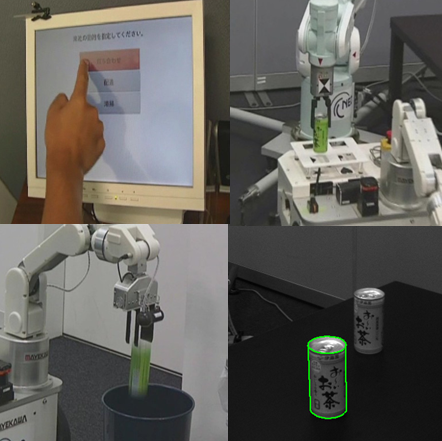
シュンク・ジャパン(旧高野ベアリング)社製電動ハンドRH707 を 制御するRTC(動作確認用RTC付き)です。
下記ライブラリを使用しています。 ●ライフロボティクス社製RH707ハンド用コントローラRH700C3制御 ライブラリ(商用)
EPLライセンスを適用しています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


人追従機能RTCモジュール群 (オープンソース)
概要)
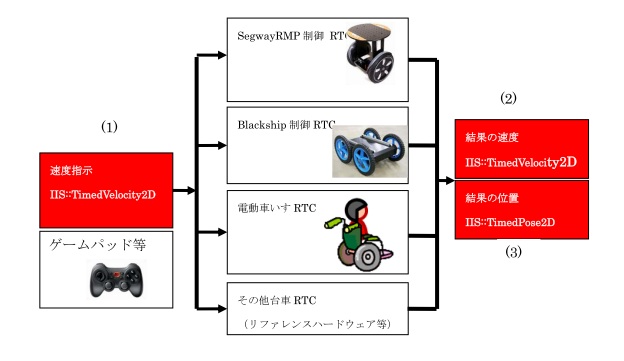
対象人物の色ヒストグラム情報を記憶して、その人を追従する移動体向けの
速度指示値を生成するモジュール群。
人追従機能モジュール群)
・人(位置・距離)認識RTC (Ubuntu/Windows)
・人追従制御RTC (Ubuntu/Windows)
・カメラRTC (Ubuntu)
・レーザーレンジRTC (Ubuntu)
・ゲームパッドRTC (Ubuntu)
※詳細は解凍後のdocフォルダにあるpdfを参照ください。
V1.1にて以下のWindows版のRTCを追加しました。
・人(位置・距離)認識RTC
・人追従制御RTC
V1.2にて
・レーザーレンジRTC(URG)の更新
・Activate/Disactivate時QTコマンド追加