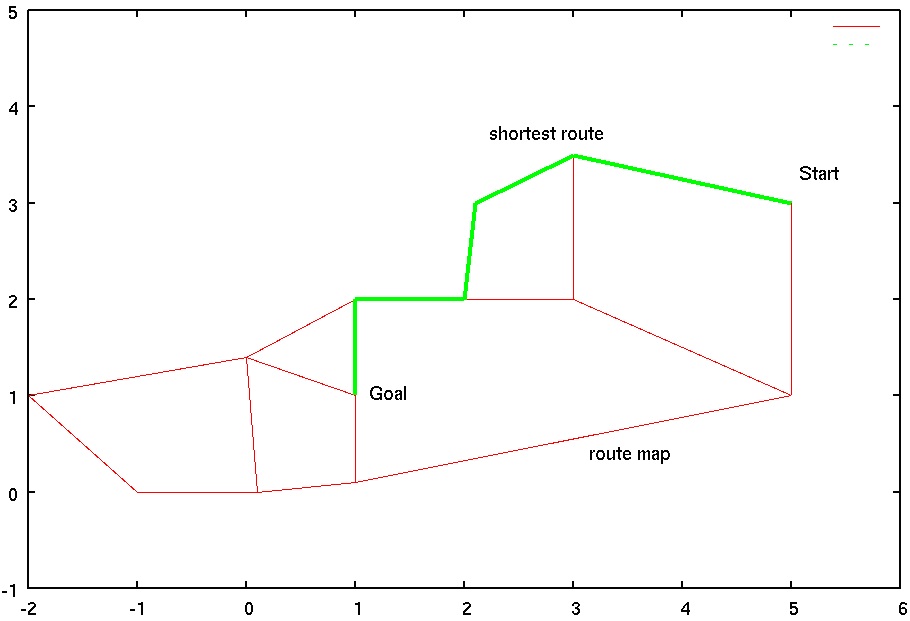
移動動作設計ツールはロボットの2次元平面上での移動経路を設計する機能を提供します。
本ツールはEclipseプラグインとC++で記述されたRTコンポーネントで構成されます。
経路地図を用い、現在位置から目標位置までの 最短経路を計算・出力するコンポーネントです。
- PathPlanning 経路計画RTC - PositionInput 目的地入力RTC(デバッグ用) (OpenRTM-aist 1.0.0-RC1 C++)
※インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
移動動作設計ツール
移動動作設計ツールはロボットの2次元平面上での移動経路を設計する機能を提供します。
本ツールはEclipseプラグインとC++で記述されたRTコンポーネントで構成されます。