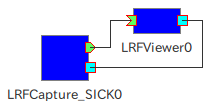
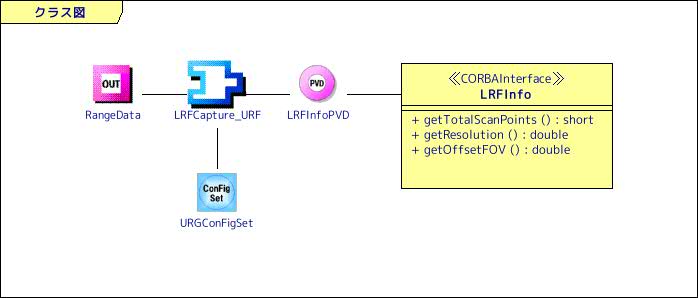
本プログラムはSICK社製LMS200シリーズ用の距離データ取得コンポーネントです。
Armadilloと北陽電機URGセンサとを組み合わせ、分散センサシステムを簡単に構築するためのユニットです。 Armadillo240上ではURGセンサRTコンポーネントが動作します。
外界センサの情報から障害物情報を生成するコンポーネントです。
- Urg_to_obstacles 測域センサ用障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
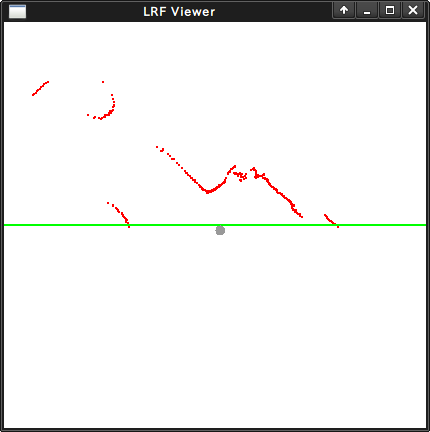
これはLRF描画コンポーネントです。 LRFキャプチャRTCからの距離データを受け取り描画を行います。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


配送ロボット
概要
特徴
仕様
コンポーネント群
新規作成
再利用