


Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
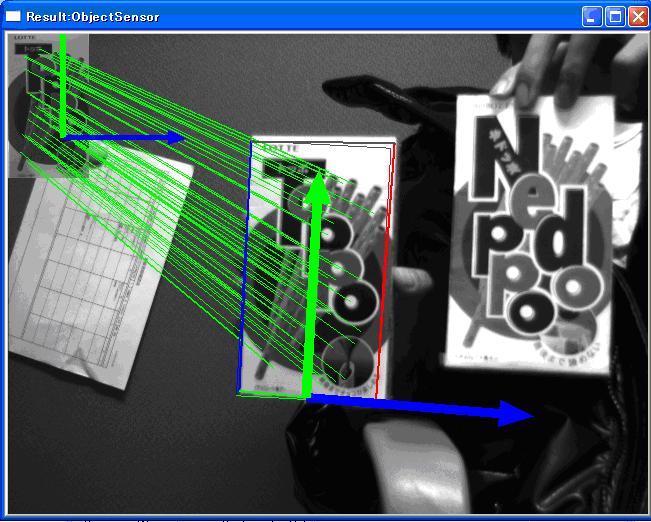
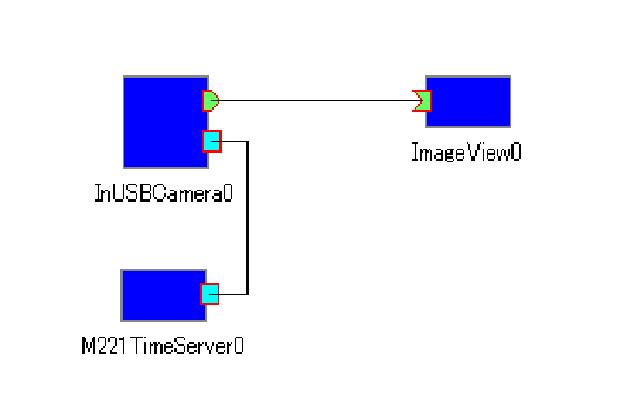
カメラコンポーネント
概要
本コンポーネントはPoint Gray製IEEE1394カメラであるFlea,Flea2,
さらにはUSB接続のWebカメラに対応し,個々のカメラから獲得された画像を出力する。
カメラの制御およびカメラ出力用のインタフェースは,知能化プロジェクトで規定された共通I/Fに準拠している.
注意事項
下記ライブラリを使用しています。
●OpenCV 1.1 / OpenCV 2.3.1
●Fly Capture v1.8 Release 23
●Web カメラドイバ
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。