Tool for RT-Component and RT-Middleware
移動動作設計ツールはロボットの2次元平面上での移動経路を設計する機能を提供します。
本ツールはEclipseプラグインとC++で記述されたRTコンポーネントで構成されます。
OpenHRP3 (Open-architecture Human-centered Robotics Platform version 3)は ロボットのソフトウェア開発・シミュレーションのための 統合ソフトウェアプラットフォームです. OpenHRP3を用いることで、ユーザは独自のロボットモデルと制御プログラムを動力学 シミュレーションで検証することが可能となります。また、OpenHRP3はロボットのソ フトウェア開発に活用可能な各種のソフトウェアコンポーネントと計算ライブラリも提供します。
rtcshell は、ネームサーバ上に登録されているRTコンポーネントをシェルから 管理することができるツールです。コンポーネントを activate/deactivate/resetしたり、ポートの接続を行うことができます。RTシ ステムを管理することもできます。
このツールは、リソースの少ないシステム、GUIが利用できない環境(特に、コン ポーネントを管理する他のPCとネットワークがつながっていない環境等)、ある いはRTSystemEditorがどうしても利用できない場合等に有効です。コマンドライ ンの利用に精通している人にとっては特に便利なツールです。
rtlogで記録されたログをGUIで再生管理するツールです。
rtctree はRTコンポーネントの管理をするPython用のライブラリです。コンポーネントのactivateやポートの接続等、RTSystemEditorをできることをPythonのプログラムから行うことができます。
rtsprofileはRTシステムプロファイル(RTSProfile)の仕様のインタフェースライブラリです。この仕様は完全なRTシステムを記述し、システムを復元することや管理することができます。XMLもYAMLを利用可能です。
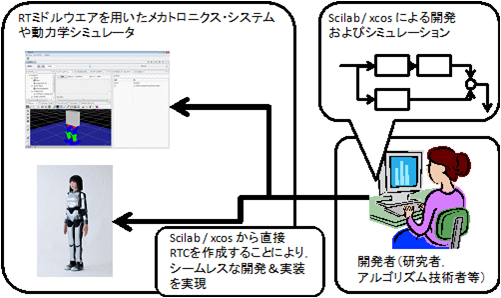
RTC-scilabは,科学技術計算ツールの「scilab」を使ってRTコンポーネントを作るためのツールボックスです.
scilabは数値解析や行列計算に適したプログラミング言語とライブラリを持っており,システム制御や信号解析などの分野でのプロトタイピングに適したツールです.またscilabは「xcos」と呼ばれるグラフィカルなツールを持っており,ブロック線図を描くようにシステムを記述することが出来ます.
RTC-scilabを使えば,数値計算に適したscilab言語を使ったプログラムからRTコンポーネントにデータを送受信することが出来ます.また,xcosを使ったグラフィカルなシステム記述にも対応しており,ドラッグ&ドロップとダイアログによる対話的なパラメータの入力によって直感的なRTコンポーネント開発が可能となります.
さらには,xcosを使ってOpenHRP3シミュレータと連携することが可能です.連携機能により,xcosシミュレーションとOpenHRP3の間の時間経過を同期することが出来るので,ダイナミカルなシステムの制御シミュレーションが可能となりました.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

移動動作設計ツール
移動動作設計ツールはロボットの2次元平面上での移動経路を設計する機能を提供します。
本ツールはEclipseプラグインとC++で記述されたRTコンポーネントで構成されます。