RT-Component
代表的なソーシャルネットワーキングサービス(SNS)であるTwitterに投稿を行えるコンポーネントです。 これによって、センサを搭載したロボットが自身の状態をSNSに投稿し、多くの人々がロボットと接する機会が増えるでしょう。
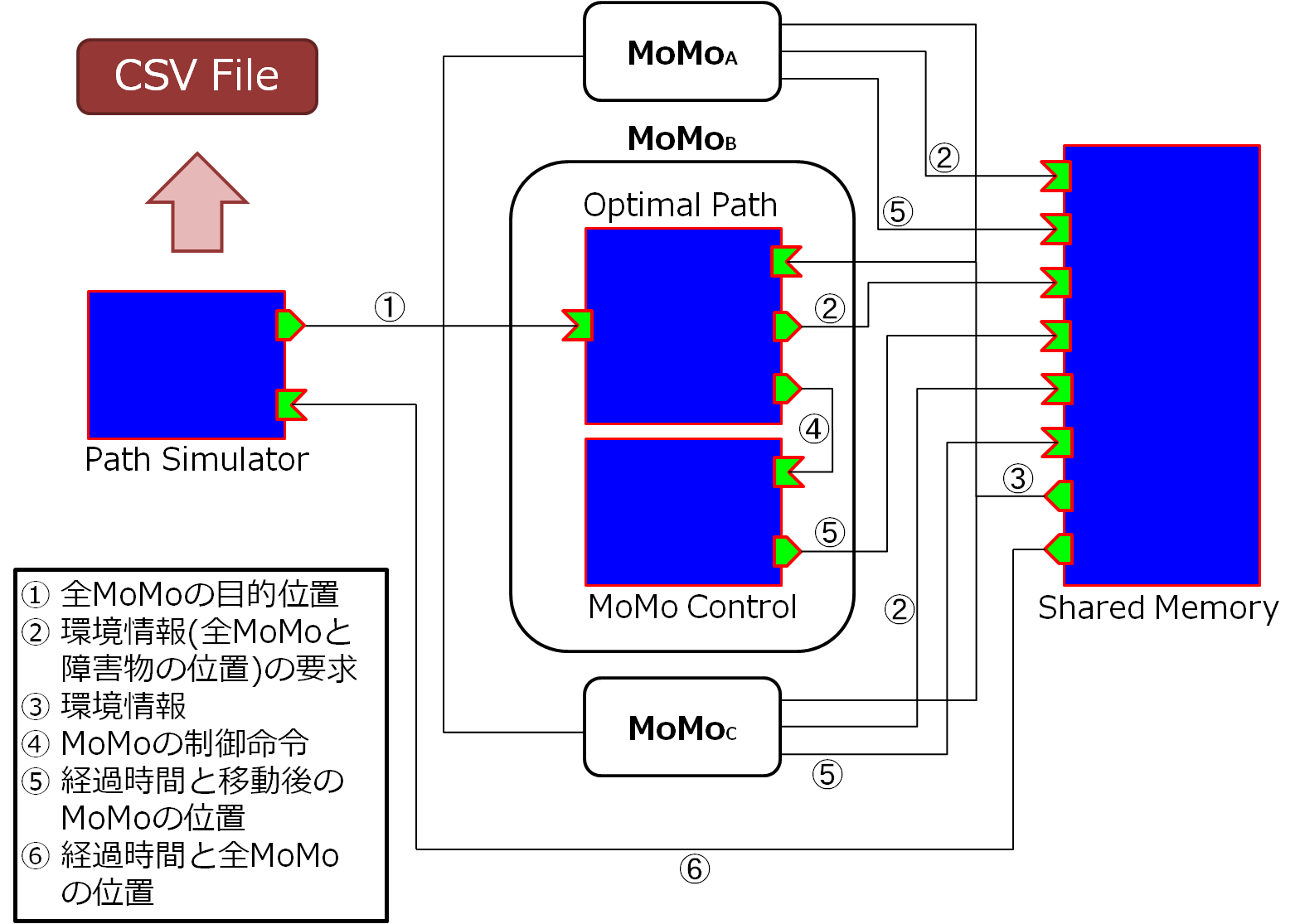
複数台の移動ロボットを対象とした経路計画法が数多く研究されている.これらの経路計画法を実環境において移動ロボットで用いる上で,事前にシミュレーション環境内での検証を行うことは必要不可欠である.そこで本コンポーネントは,複数台の移動ロボットを対象とした経路計画法の検証を支援する.
RGB-Dセンサを利用した,ユーザの指差し位置を認識するためのコンポーネントです. 簡便な準備で使用できるようにすることを目標に作成しています. 迅速にキャリブレーションを行い,システムに組み込むことができるようになります.
ロボット動作時の信頼性を高めるRTCを公開する。 また、昨年度のRTMC2013で公開した「写真撮影RTC群」について 実際のデモンストレーションでの動作を通して得た問題点を改善するRTCを公開する。
AR.Drone組込みシステム用コンポーネントはBSD/LGPLライセンスのCV Drone(https://github.com/puku0x/cvdrone)を使用しています。 本コンポーネント使用時はhttps://github.com/yukikawana/ARTC_ardrone にありますcvdrone-license-LGPL.txt及びcvdrone-license-BSD.txtをご確認ください。 ライセンス、コードの公開について問題をご指摘頂きました、CV Drone制作者のpuku0x様とMiyamoto Nobuhiko様に深く感謝申し上げます。 (2015/08/23追記)
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




屋内地図モデルの簡易生成コンポーネント群
概要
特徴