RT-Component
随時更新していきます.(Windowsに対応しました.)
近年サービスロボットが発展してきており,サービスロボットが人間の日常環境で動作するためには人間とロボットのインタラクション方法は重要な課題である.この課題に対して,本システムでは,直接的なインタラクションとしての音声認識技術と,サービスロボットに必要な能力の1つの物体認識を組み合わせたシステムを構築した.本システムは,公開されているRTコンポーネントをベースに構築しており,音声認識コンポーネントの群のOpenHRI,さらにアピアランスベース物体認識コンポーネントや,共通カメラインタフェースに基づくカメラコンポーネントなどから構成されており,幅広いロボットシステムへの応用可能なシステムとなっている.
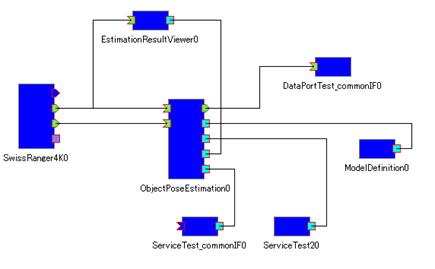
このコンポーネントはスイス MESA社製の3次元距離測定カメラ SwissRanger SR4000からのデータを基に机上の複数個の直方体物体と円筒物体の3次元空間上での位置と姿勢を推定するコンポーネントです。 2012年2月22日にコンポーネント本体とマニュアルを更新しました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
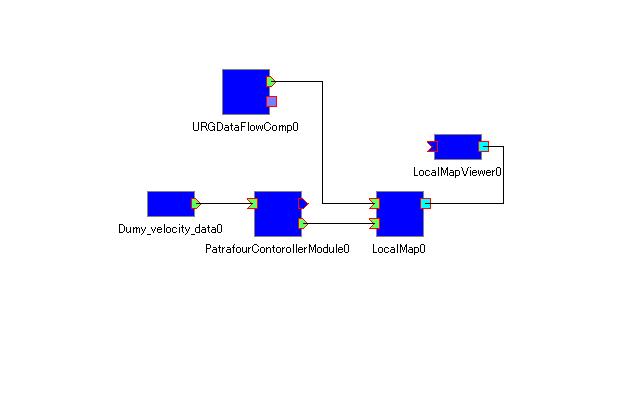
このコンポーネントは関東自動車工業株式会社の「Patrafour」(パトラフォー)用の 制御コンポーネントです。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
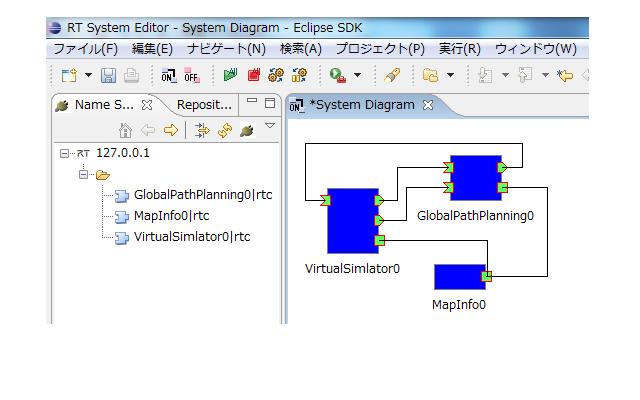
大域的経路計画モジュールは、障害物を回避しながら指定地点への大域的な準最適経路を計画する コンポーネントです。 設定されている環境情報から準最適経路を算出し、現在位置から目標地点への中間経路を求めます。 間に壁があるなど複雑な経路であっても、その地点への経路を大域的に探し出し中間経路を出力します。
商用以外の利用の場合、修正BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
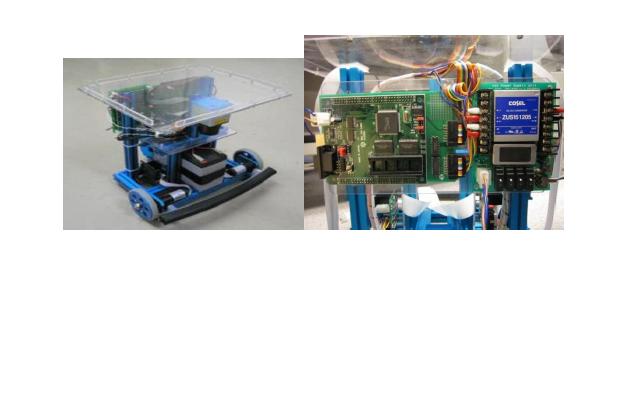
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス ロボット)を操作するモジュール群です。
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。 ●リファレンスロボットの実行にはRTC-CANopenが必要となります。
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に 帰属します。 ・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の 場合は別途ご相談下さい。 なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。
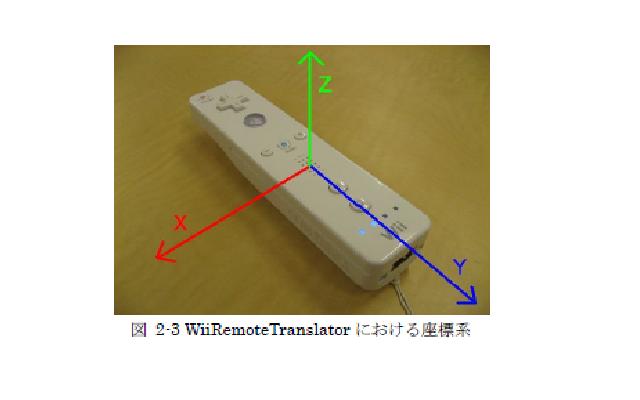
Wiiリモンコン用のコンポーネントで,ボタンや加速度のデータを 取得できます。また,ヌンチャクやクラシックコントローラなどの 拡張コントローラに対応していますています。
・マイクロソフト株式会社より提供されているWindows 用のデバ イスドライバ開発キット(WDK)のソースコード及びライブラリを 除き,WiiRemoteComponentsの著作権は,芝浦工業大学水川研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
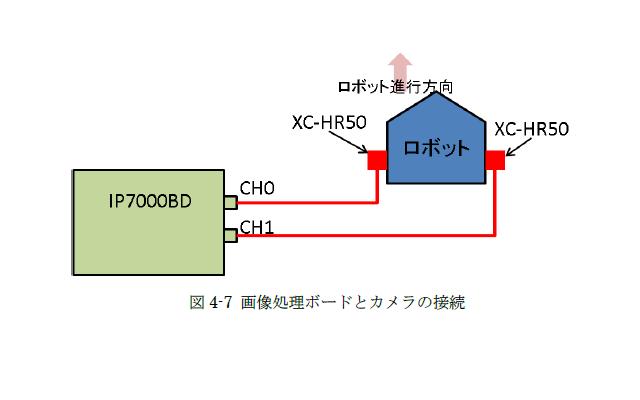
DFITコンポーネントは,ロボットの横に装着した2台のカメラから路面 画像を取得,それぞれの路面がどれだけ動いたかを測定し,その 結果より相対的なロボットの自己位置を推定するRTコンポーネント です。
・DFITコンポーネントの著作権は,芝浦工業大学ヒューマン・ ロボット・インタラクション研究室に帰属します。 但し,IP7000BDを制御するソースコード及びライブラリの著作権は, 開発元の”日立情報制御ソリューションズ”にあります。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
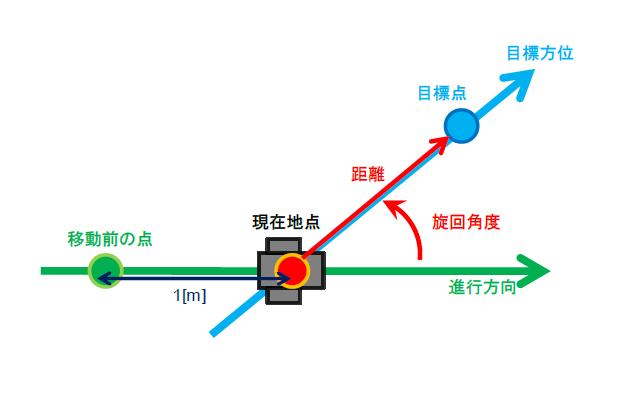
GPSから受信したデータをもとに,ロボットのナビゲーションのために 必要な処理を行うコンポーネントであり,現在地点から目標点への 距離・旋回角度の出力を行います。
・GPSナビゲーションコンポーネントに関する著作権は,芝浦工業 大学ヒューマン・ロボット・インタラクション研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


音声認識による物体認識システムの開発
随時更新していきます.(Windowsに対応しました.)
概要
近年サービスロボットが発展してきており,サービスロボットが人間の日常環境で動作するためには人間とロボットのインタラクション方法は重要な課題である.この課題に対して,本システムでは,直接的なインタラクションとしての音声認識技術と,サービスロボットに必要な能力の1つの物体認識を組み合わせたシステムを構築した.本システムは,公開されているRTコンポーネントをベースに構築しており,音声認識コンポーネントの群のOpenHRI,さらにアピアランスベース物体認識コンポーネントや,共通カメラインタフェースに基づくカメラコンポーネントなどから構成されており,幅広いロボットシステムへの応用可能なシステムとなっている.