RT-Component
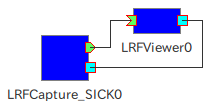
本プログラムはSICK社製LMS200シリーズ用の距離データ取得コンポーネントです。
奈良先端科学技術大学院大学 情報科学研究科 j-taka@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
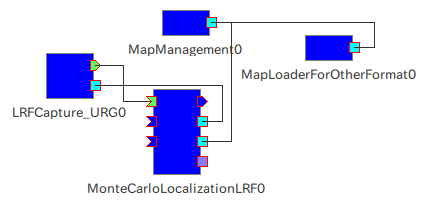
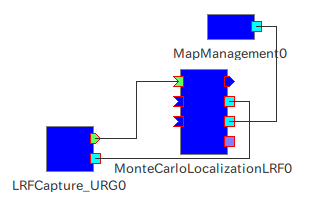
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
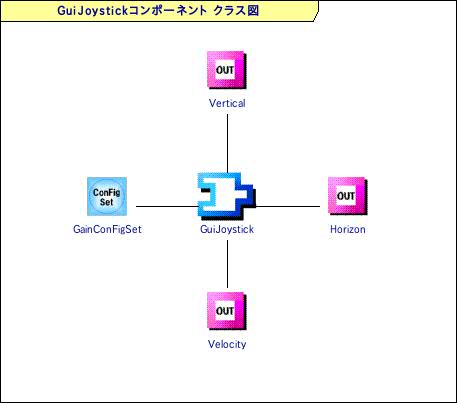
本プログラムは、GUIを利用したジョイスティックシミュレートコンポーネント です。x-y座標上でクリック(ドラッグ)した任意の座標値を出力します。 付加機能としてロボット走行指令のためのTimedVelocity型の値を出力 することも可能です。
このコンポーネントは、Point Grey Research社製 IEEE-1394bカメラ(Flea2)2台を1つのステレオカメラとして扱い、最大2つのステレオカメラを制御する機能を有する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
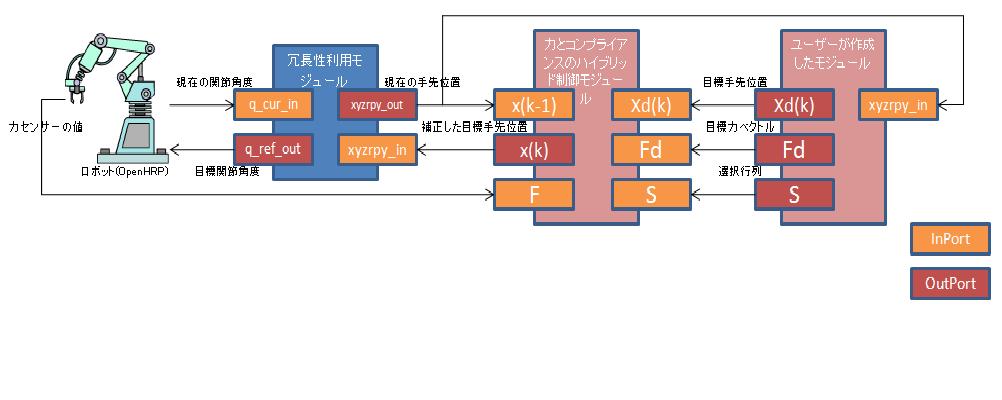
本モジュールは、ロボットのモデル、作業対象物のモデルから運動学を解き、 現在受けている外力から拘束面を推定し、拘束力を一定にしつつ指定された 目標位置にもっとも近くなる目標角度偏差を出力するモジュールです。
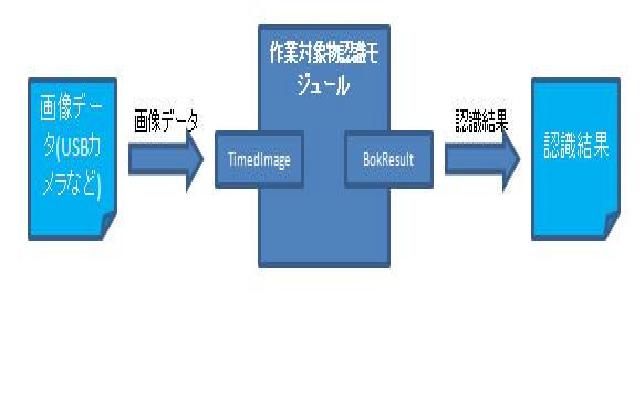
本モジュールは、入力された画像に対してBagOfKeypoints法を使用し、 作業対象物を認識し、認識した対象物と確度を出力するモジュールです。
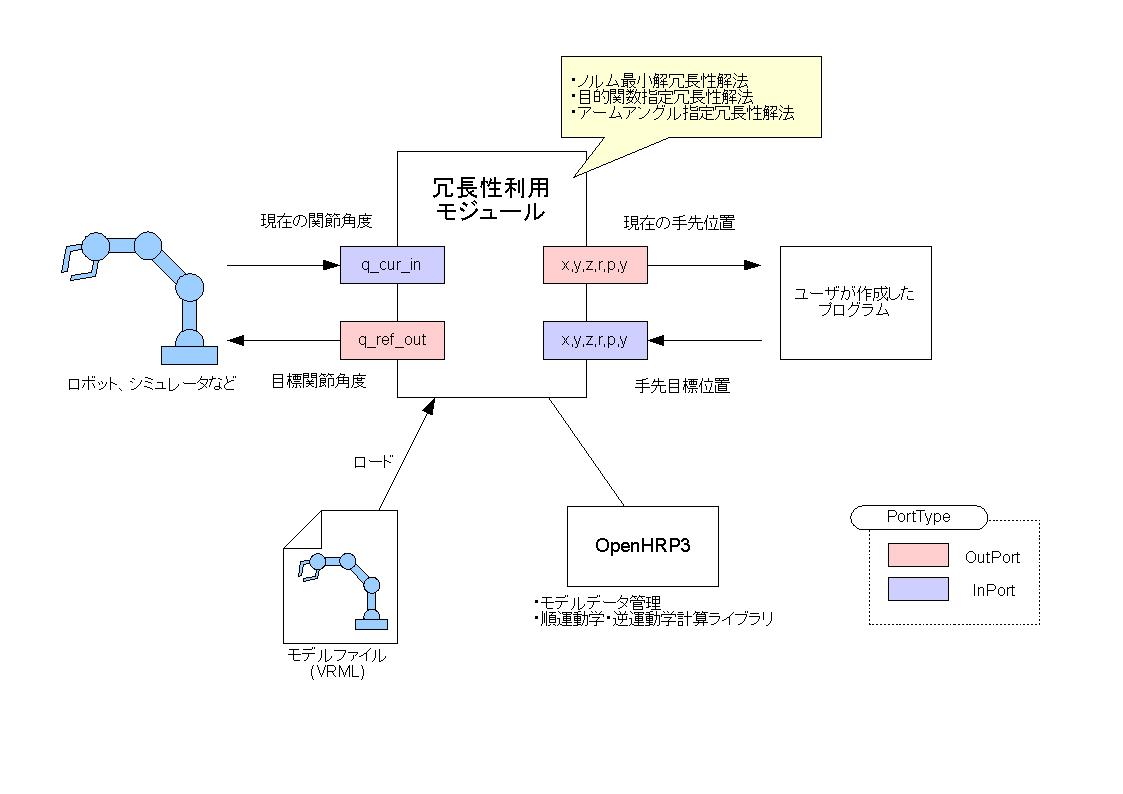
本モジュールは、冗長性を持つロボットアームにおいて、ユーザが指定する 手法で冗長自由度を決定し、現在位置との偏差を出力するコンポーネント です。
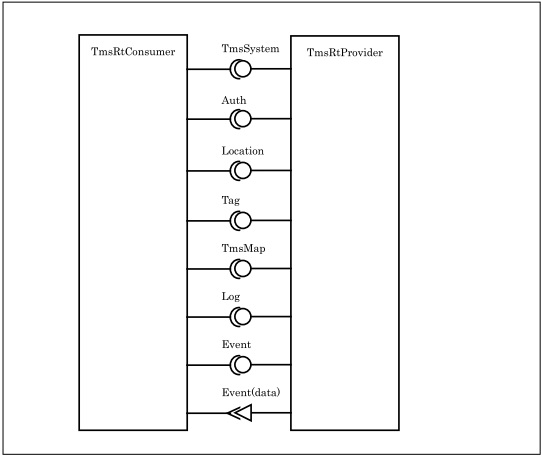
●利用にはタウンマネジメントシステムが必要です。コンポーネントに同梱しております。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

ハンド把持動作計画モジュール
概要
本システムは、視覚モジュールなどにより計測された把持対象物の位置姿勢と事前に保存された把持姿勢情報から、アプローチ位置姿勢とハンドの把持位置姿勢を計算する
把持計画モジュールです。
ライセンス
GPLライセンスを適用いたします。連絡先
独立行政法人 産業技術総合研究所kensuke.harada@aist.go.jp, tsuji@ait.kyushu-u.ac.jp,
y.kawai@aist.go.jp
〒305-0046 茨城県つくば市梅園1-1-1
中央第2知能システム研究部門タスクビジョン研究グループ
Tel/Fax:029-861-5977/029-862-6519
Download