RT-Component
このコンポーネントはTimed Velocity データを複数に分岐するコンポー ネントです。
修正BSDライセンスを適用しています。
このコンポーネントはLRS Timed Measured Data データを複数に分岐する コンポーネントです。
このコンポーネントはTimed Odometry データを複数に分岐するコンポー ネントです。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
このコンポーネントはMobile Robots 社のロボット用の 制御コンポーネントです。
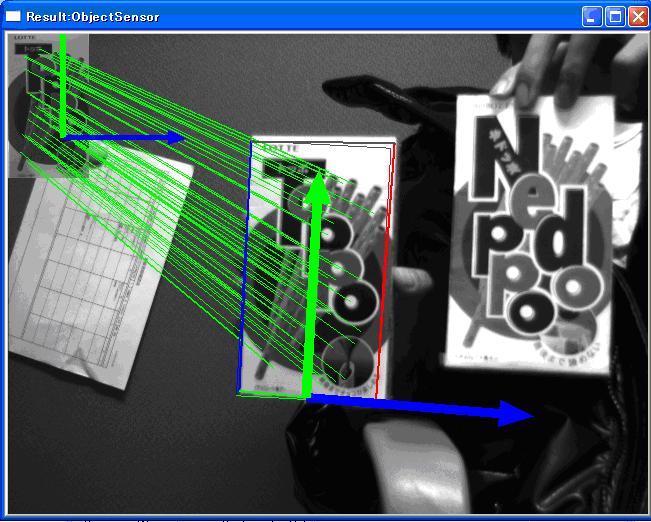
このコンポーネントは静止・移動障害物を回避しながら,指定物体を追う 経路を計画するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
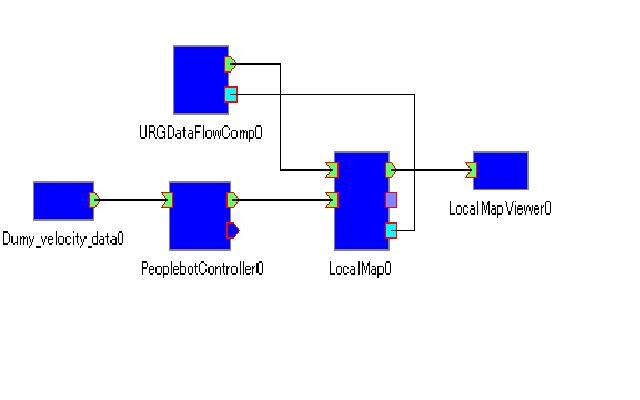
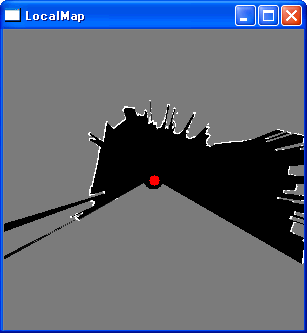
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
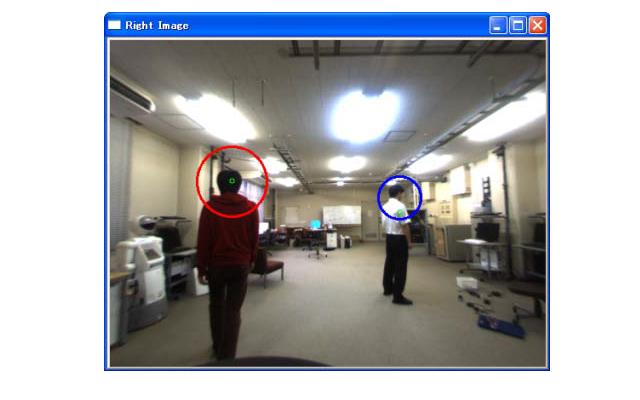
このコンポーネントはステレオカメラ(Bumblebee 2)の情報から人物を 検出し,それぞれの人物の位置と移動速度を出力するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●FlyCapture (配布元:http://www.ptgrey.com/) ●Triclops(配布元:http://www.ptgrey.com/))
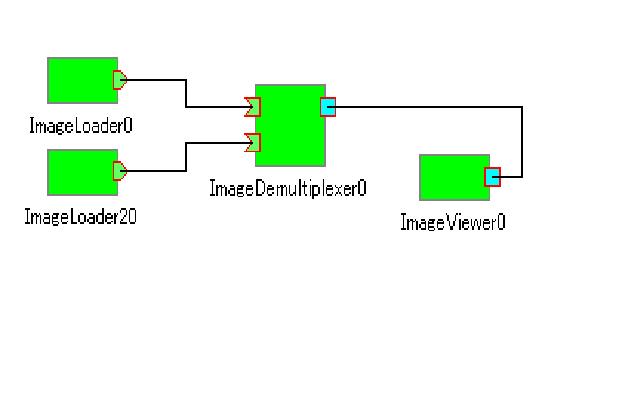
画像をJPEGに変換して転送したり,JPEG画像やOpenCV画像を表示 したりするコンポーネント群です。
下記ライブラリを使用しています。 ●OpenCV 1.0.0 ●JPEG変換にIJGのライブラリ
本コンポーネントはPoint Gray製IEEE1394カメラであるFlea,Flea2, さらにはUSB接続のWebカメラに対応し,個々のカメラから獲得された画像を出力する。 カメラの制御およびカメラ出力用のインタフェースは,知能化プロジェクトで規定された共通I/Fに準拠している.
下記ライブラリを使用しています。 ●OpenCV 1.1 / OpenCV 2.3.1 ●Fly Capture v1.8 Release 23 ●Web カメラドイバ
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

TimedVelocityHubRTC
概要
このコンポーネントはTimed Velocity データを複数に分岐するコンポー
ネントです。
ライセンス
修正BSDライセンスを適用しています。