RT-Component
ARTool Kitを利用し、マーカの検出・位置姿勢推定を行うRTC。
下記ライブラリを使用しています。 ●ARTool Kit 2.72.1, OpenGL, GLUT, GLEW, OpenCV 2.0.0
ARTool Kitマーカ検出・位置姿勢推定モジュール 本モジュールのライセンスは、ARTool Kit のライセンス(GPL)に従います。 本モジュールの改変・再配布等については、GPL に従って行ってください。
画像キャプチャコンポーネント 商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
Kinectセンサーから全身(head, neck, shoulder, elbow, hand, torso, hip, knee, foot)の位置を取得し、アウトポートから出力するコンポーネントです。
UNIX型ジョイスティックデバイス用のRTコンポーネントです。UNIXで使えるジョイスティックならこのコンポーネントで使えます。軸もボタンの数はコンフィグレーションパラメータで選択できます。
フレキシブルなユーティリティコンポーネント
Stage(ステージ)ロボットシミュレータコンポーネントです。2次元シミュレータで異同ロボットの実験ができます。一つのシミュレータで複数のロボットが使えます。
北陽電気のレーザーセンサー用のRTコンポーネントです。URG-04LX (Classic-URG)、UHG-08LX (Hi-URG)、UTM-30LX (Top-URG)、UXM-30LX/UXM-30LX-E (Tough-URG)を含めてすべての北陽電気のセンサーを対応します。
リアルタイムが可能性です。通信遅延のキャリブレーションを使って、正確なタイムスタンプを出します。
バイナリインストーラーとソースはここからダウンロードできます。 Flexiportライブラリ も HokuyoAISTライブラリ もインストールすることが必要です。
外界センサの情報から障害物情報を生成するコンポーネントです。
- Urg_to_obstacles 測域センサ用障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
障害物情報から衝突を判定するコンポーネントです。
- CollisionDetection 障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
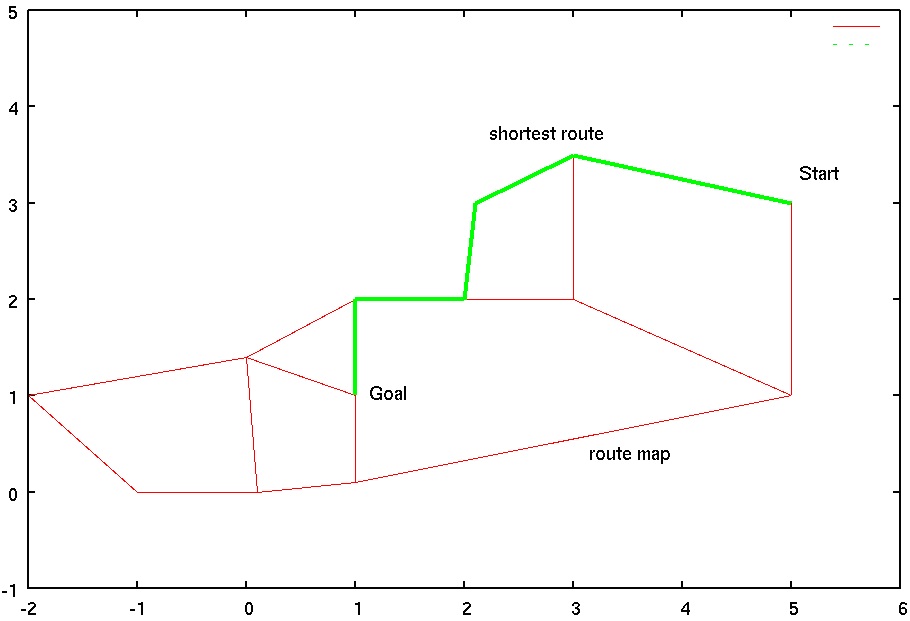
経路地図を用い、現在位置から目標位置までの 最短経路を計算・出力するコンポーネントです。
- PathPlanning 経路計画RTC - PositionInput 目的地入力RTC(デバッグ用) (OpenRTM-aist 1.0.0-RC1 C++)
※インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
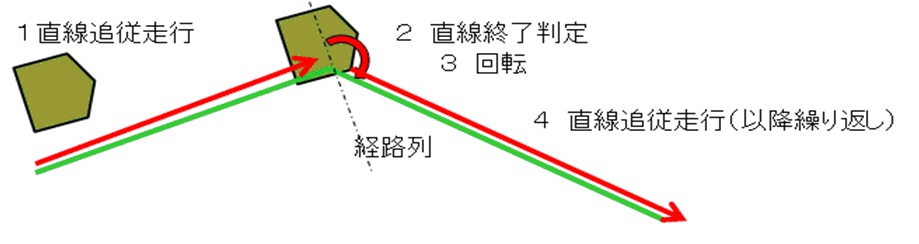
目標経路を追従し経路目的地まで移動するための車体速度情報を出力する自律移動コンポーネントです。
- Navigation 経路走行RTC - PathFollowing 経路追従RTC (OpenRTM-aist 1.0.0-RC1 C++)
BSDライセンス。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


ARTool Kitマーカ検出・位置姿勢推定モジュール
概要
ARTool Kitを利用し、マーカの検出・位置姿勢推定を行うRTC。
注意事項
下記ライブラリを使用しています。
●ARTool Kit 2.72.1, OpenGL, GLUT, GLEW, OpenCV 2.0.0
ライセンス
ARTool Kitマーカ検出・位置姿勢推定モジュール
本モジュールのライセンスは、ARTool Kit のライセンス(GPL)に従います。
本モジュールの改変・再配布等については、GPL に従って行ってください。
画像キャプチャコンポーネント
商用以外の利用の場合、BSDライセンスが適用されます。
商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。