RT-Component
多くの人々がアンケートに答えたとしてもそれらの結果のうち,どれほどが信頼できる結果なのかわからない.特に紙媒体のアンケートは,1問1問にどれほどの時間をかけて真剣に回答しているかなどを把握することができない.それに対し,タブレットでアンケートを行った場合は,設問を回答する際にタブレットの画面をタッチするのでそのタッチ間隔の時間を計測することができる.そこで,今回は紙媒体の代わりにタブレットでアンケートを行うことにより,設問ごとの回答時間を把握し,回答時間の違いを用いて重みづけ評価を行うutteranceServer RTCとアンケート結果・回答時間・重みづけ評価の結果をRSNPでサーバーに送信するためのクライアントとしてConciergeRSNP5 RTCの2つを開発した.これらのRTCを用いることで従来の紙媒体のアンケートでは発見することのできなかった様々な情報をタブレットのアンケートで取得可能となり,情報をサーバーで一括管理することが可能となる.
OpenRTM上でMongoDBにアクセスするためのコンポーネント
センサーやロボットから出力されたデータをMongoDBに格納します
Kobuki,NAVIO+,Kinect用に作成
任意のコンポーネント用に作成するためのドキュメントも用意
ZIPファイル
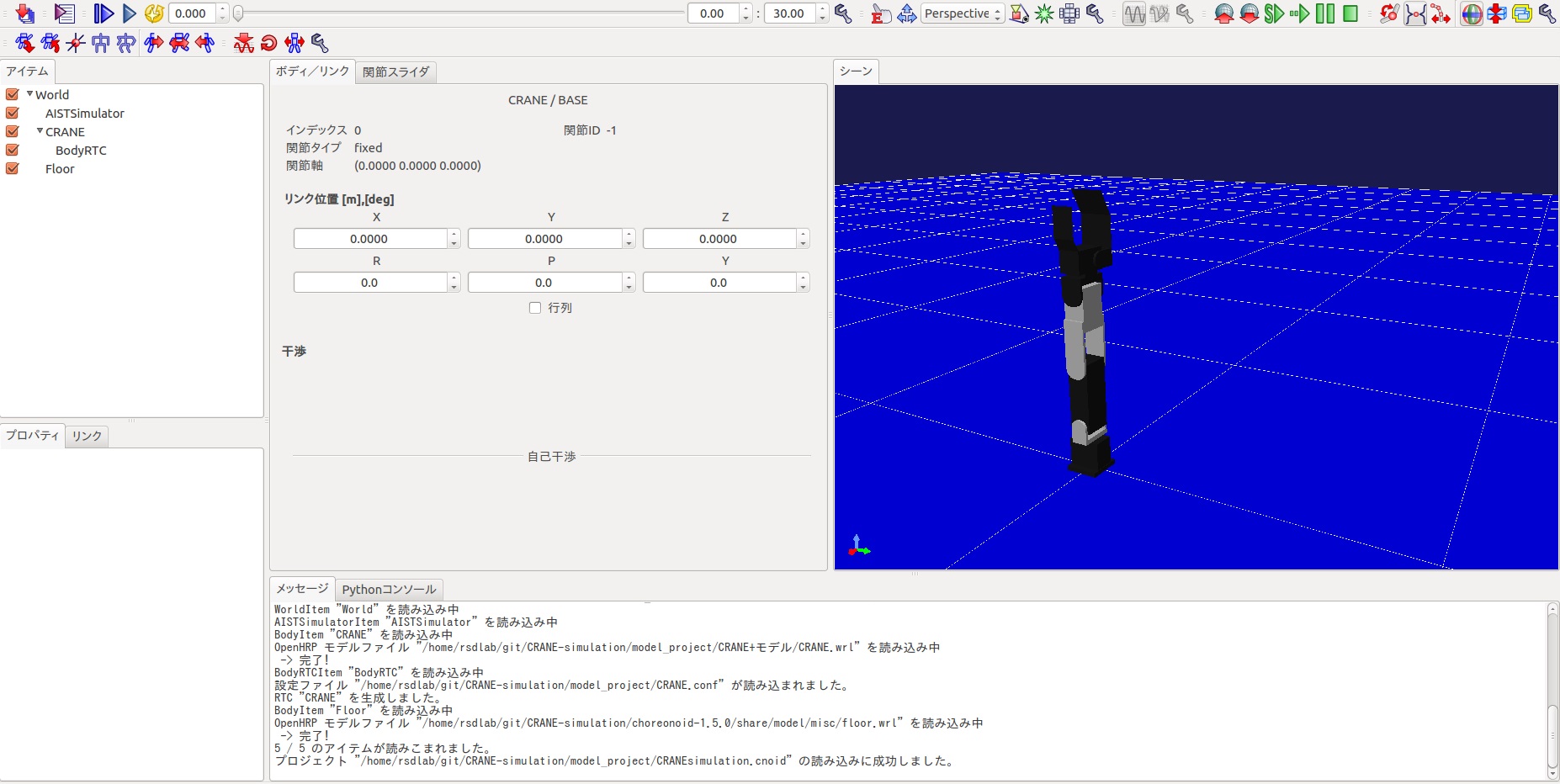
教育用ロボットアームであるCRANE+を動力学シミュレータChoreonoid上で動作する環境を構築しました。 RTコンポーネントを使って簡単に動かすことができるのでロボットアーム教育に活用できます。
ソースコードとマニュアルをアップしました.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

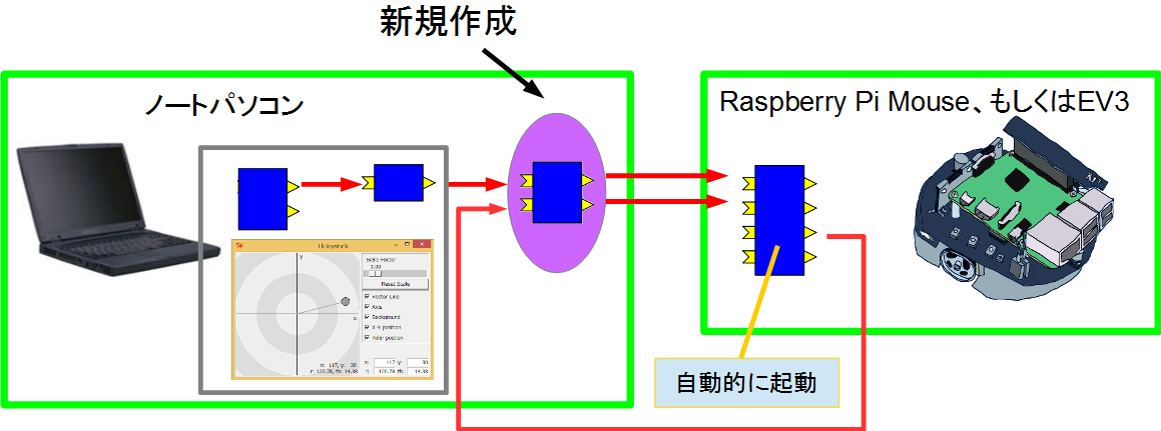
RTミドルウェア入門用コンポーネント群StarTnoの開発
概要