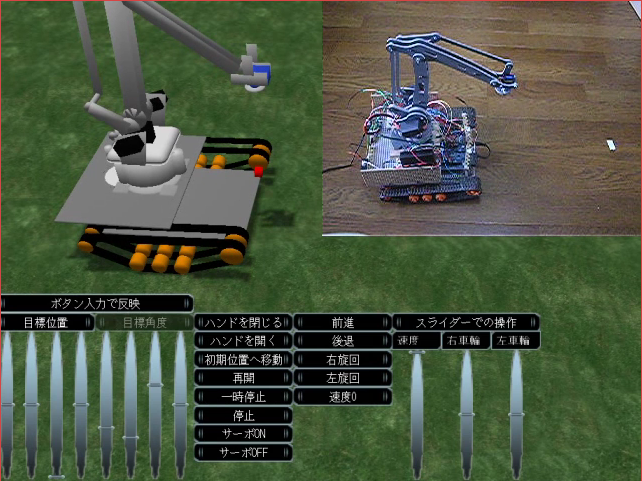
このプロジェクトは大きく分けてロボット台車とロボットアームの制御の2つから構成されています. ~ロボット台車~ 台車にはKobukiを使用します.Kobukiへの移動指令は,音声による入力とゲームパッドによる入力の2種類が用意されています.音声入力では,入力デバイスとしてAndroid端末を使用します.Android on RTMの音声認識アプリケーションにより,特定の音声が認識されるとそれに対応した目標座標がKobukiへ入力されます.Kobukiは目標座標へ車輪からのオドメトリ情報を参照しながら自律的に移動することができます.また,ゲームパッドによる入力では,ジョイスティックからのアナログ値の入力により,人間が直接Kobukiを操作できるようになっています.
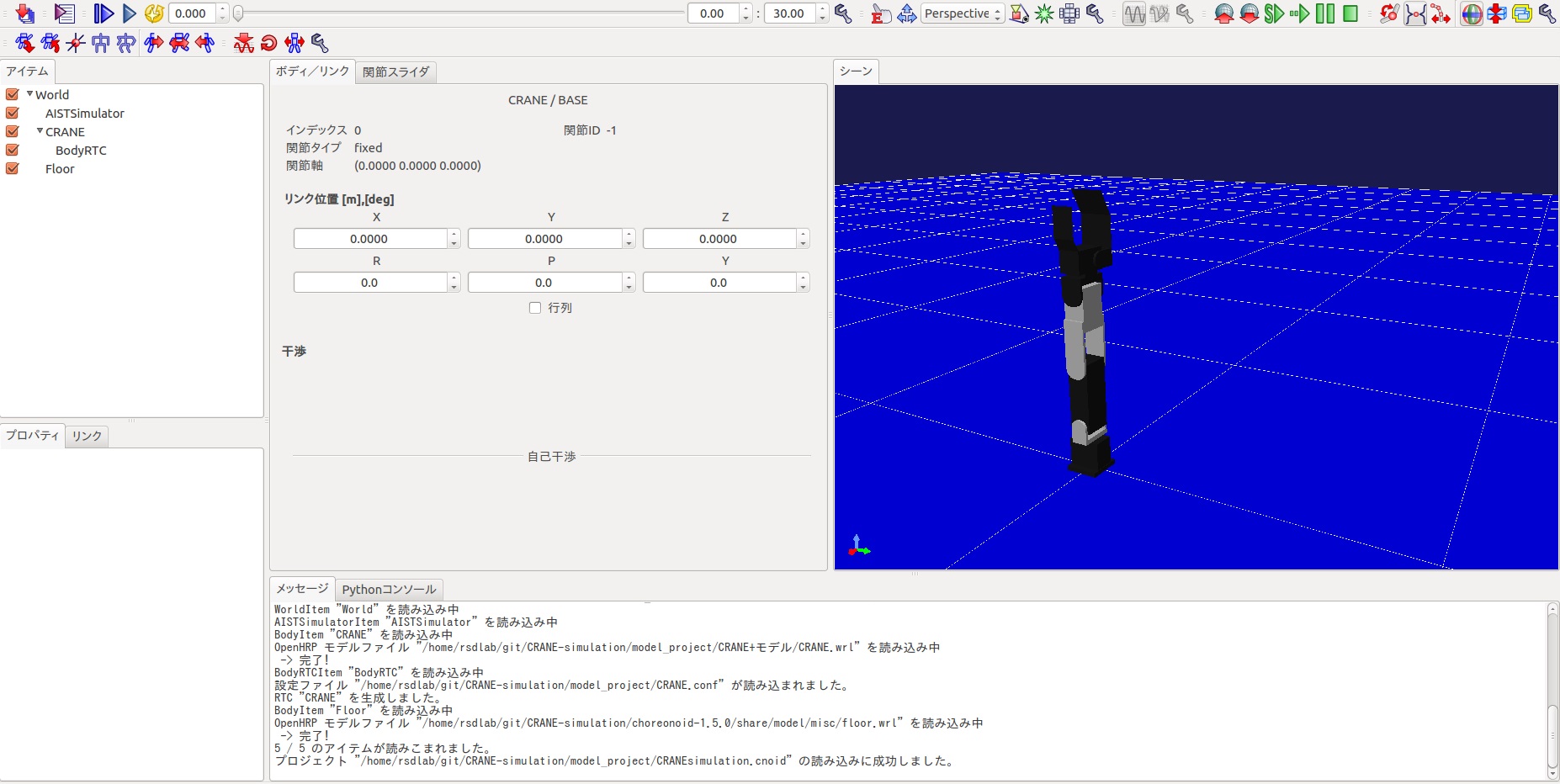
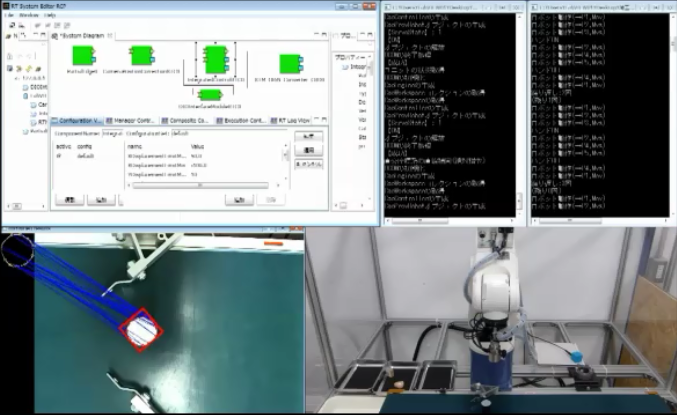
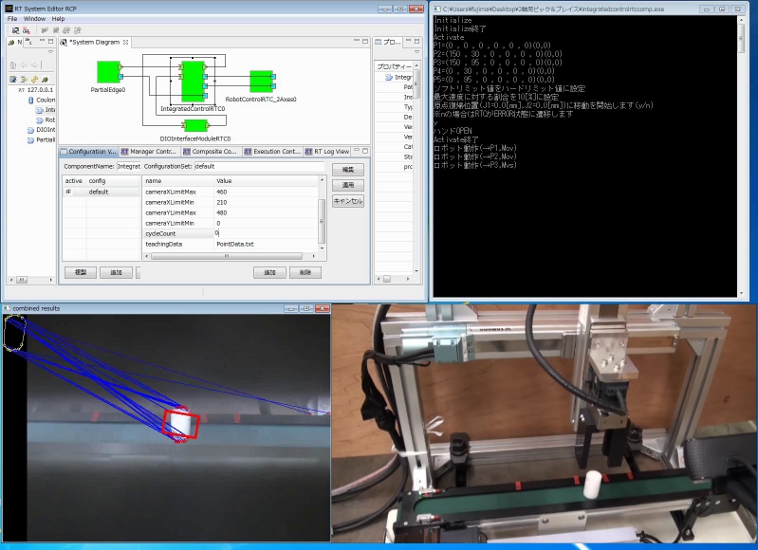

ロボットアーム RT Corporation CRANE-X7 制御コンポーネント
概要
ポートの説明