修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
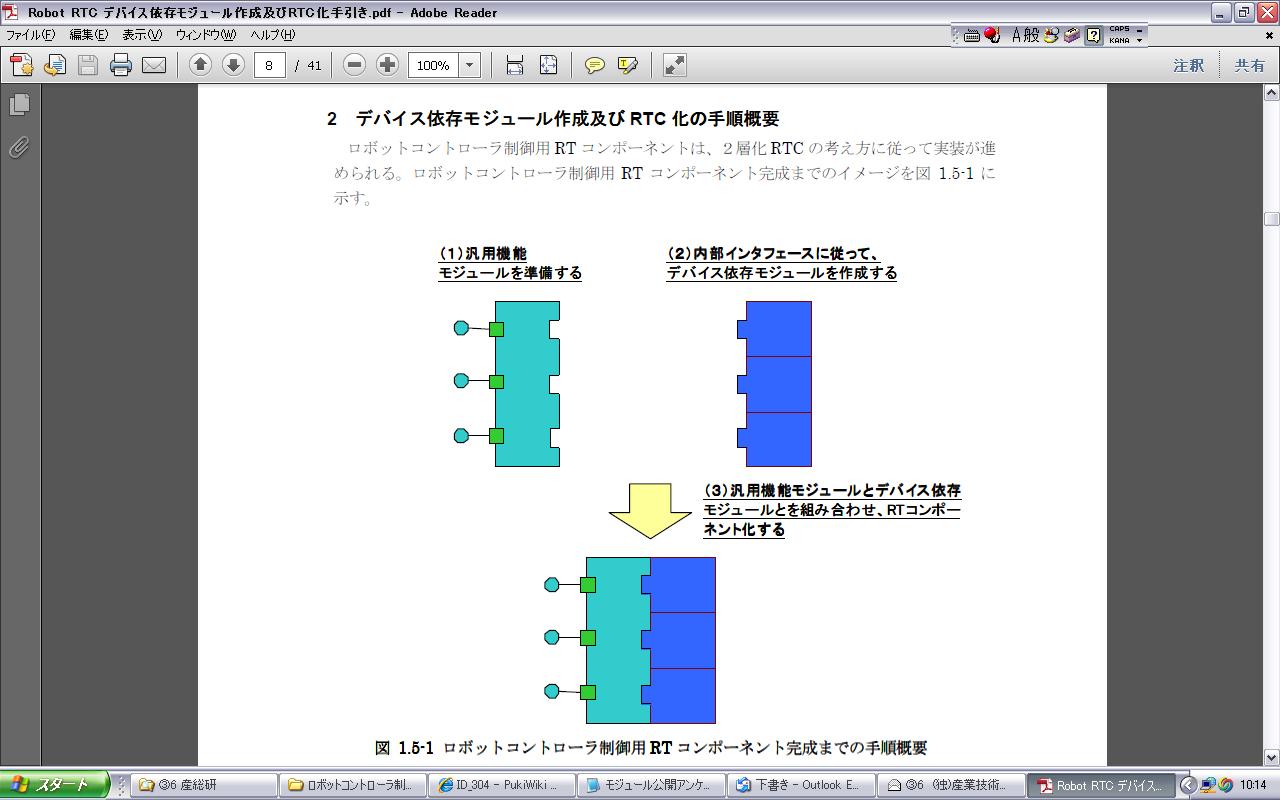
このコンポーネントは、ロボットコントローラ制御用RTCの共通インタフェースモジュールです。ACT共通インタフェース対応版です。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
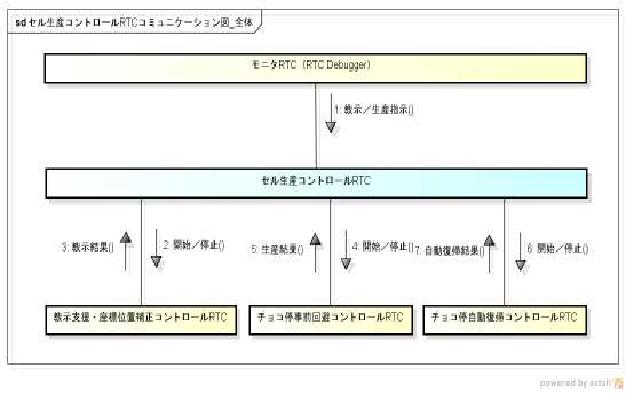
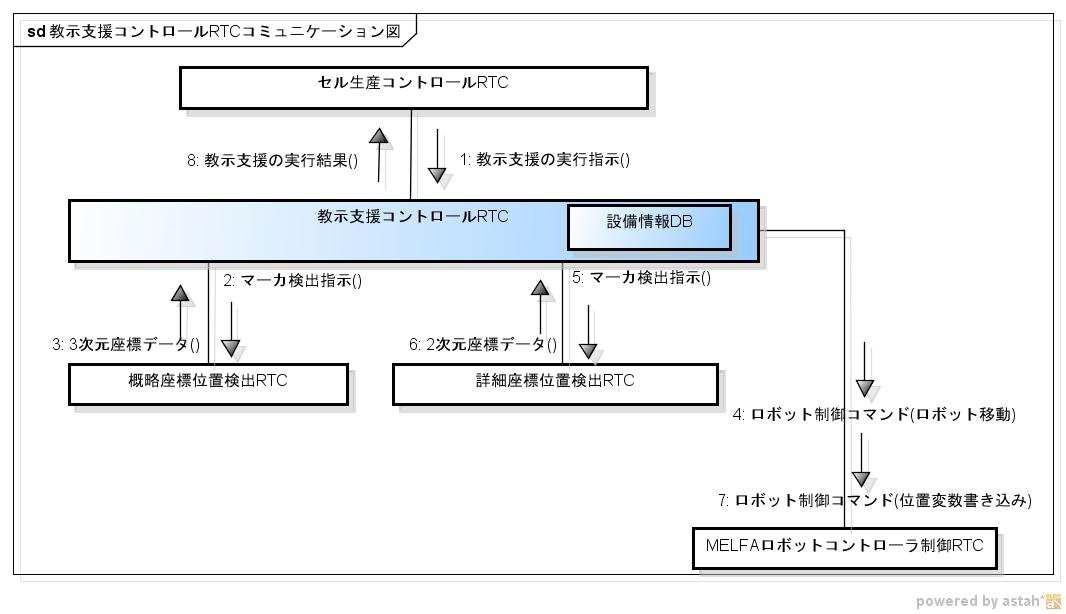
本RTコンポーネントは、ロボット制御セル生産システムにおける「教示」と 「生産」の2つの状態を制御する機能を有する。
このコンポーネントは、データポートより、部品トレイ上のマーカ座標を読み込んで、そのマーカ座標と設備情報から、各部品の座標を算出して、その座標をロボットコントローラのロボット位置変数へ書き込む機能を有する。
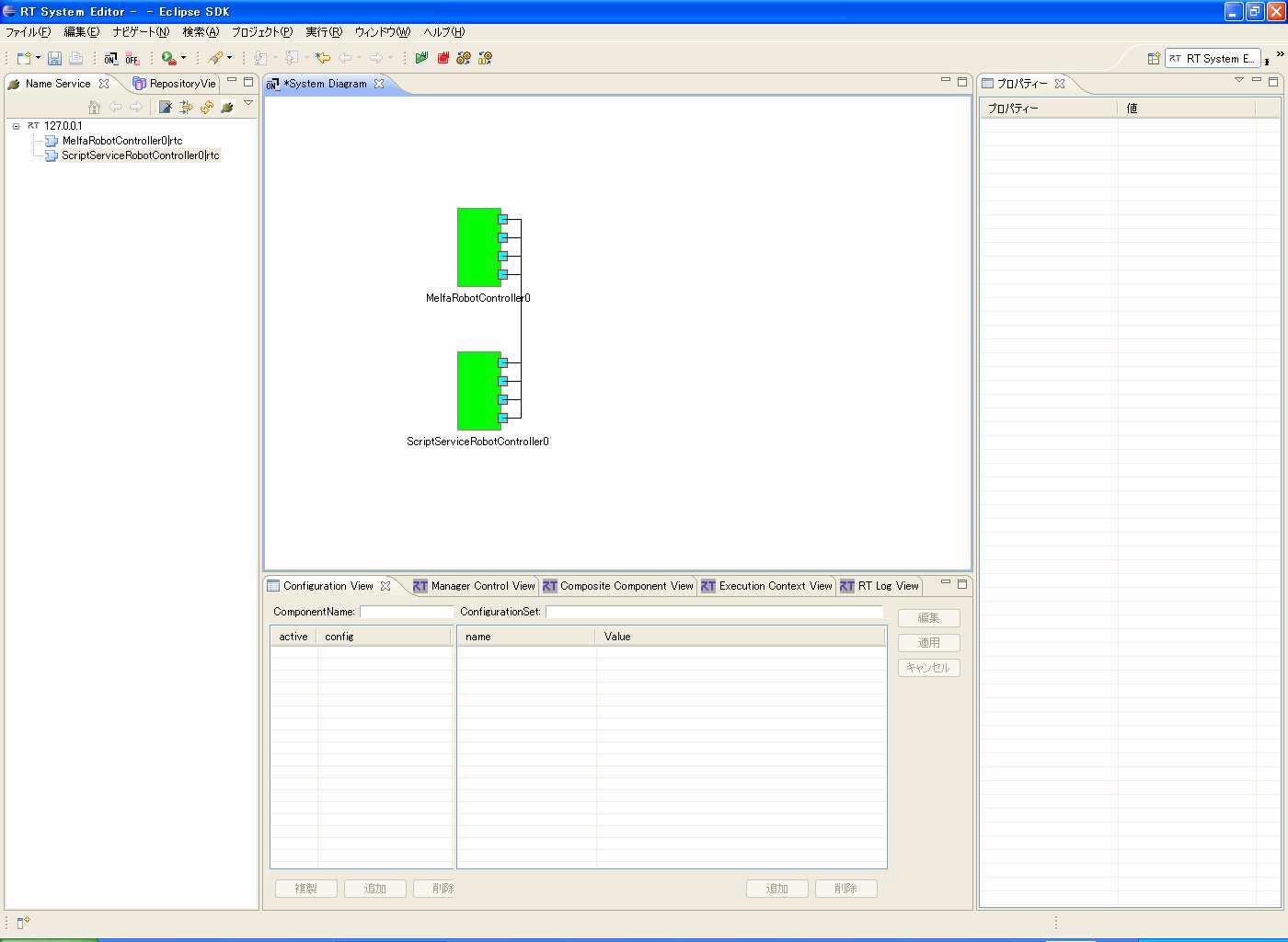
このコンポーネントは、三菱電機製MelfaRXM向けのロボットコントローラ制御用RTCです。ACT共通インタフェース対応版です。
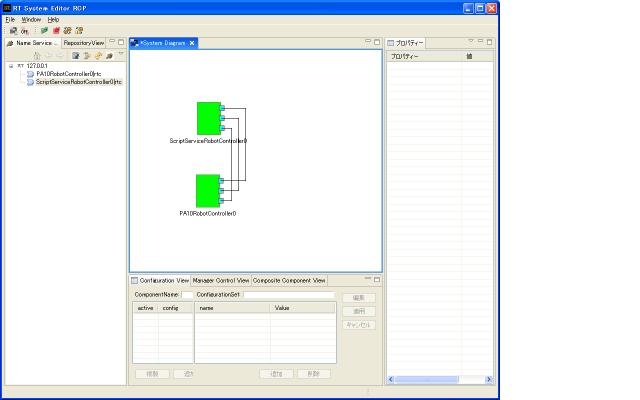
OpenHRP3 で開発したロボット制御コンポーネントを用いて、実ロボットマニピュレータPA10を制御するためのRTコンポーネント。シミュレーションと実機制御との間の移行を完全シームレス化することが可能。
著作権は開発者に帰属します。大学・公的研究機関における教育・研究目的では無償で利用を許可します。商用利用についてはお問い合わせください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


ロボット動作モニタコンポーネント
概要
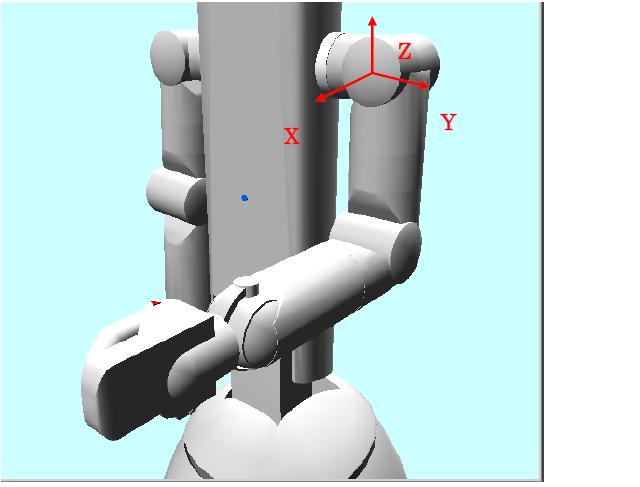
本コンポーネントは、ロボットの三次元モデルをディスプレイに表示する機能を持つ コンポーネントです。注意事項
●コンパイルにはGLUTのインストールが必須となります。ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
筑波大学 大学院システム情報工学研究科
aiyama@esys.tsukuba.ac.jp
〒305-8573 茨城県つくば市天王台1-1-1
Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)