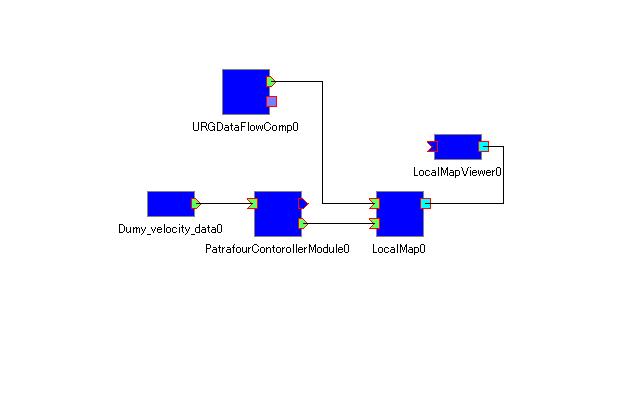
このコンポーネントは関東自動車工業株式会社の「Patrafour」(パトラフォー)用の 制御コンポーネントです。
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
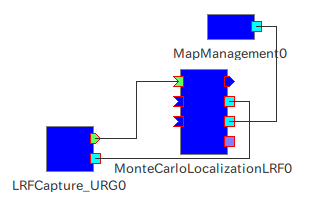
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
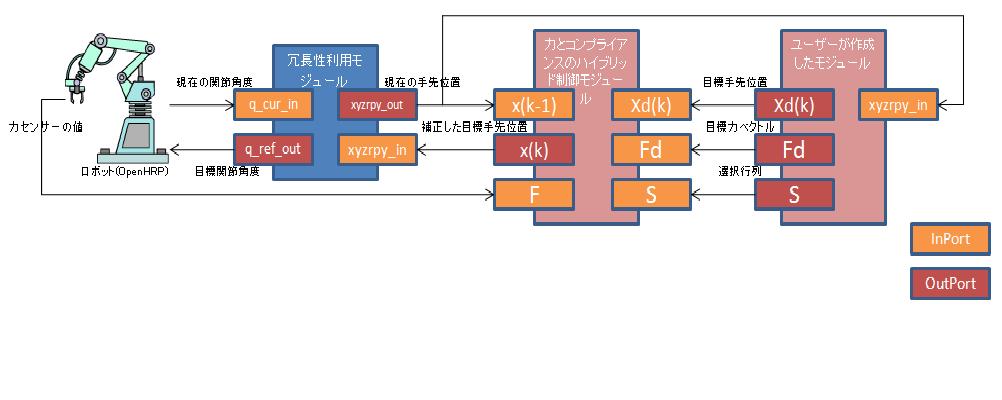
本モジュールは、ロボットのモデル、作業対象物のモデルから運動学を解き、 現在受けている外力から拘束面を推定し、拘束力を一定にしつつ指定された 目標位置にもっとも近くなる目標角度偏差を出力するモジュールです。
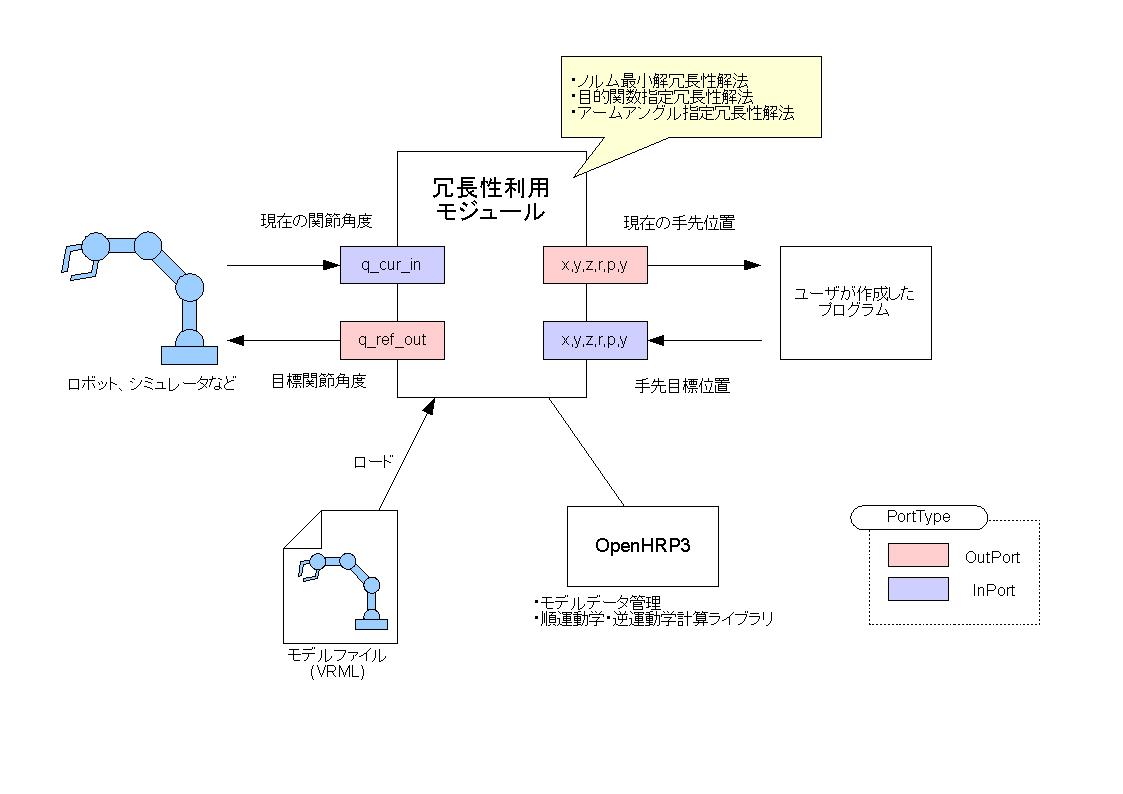
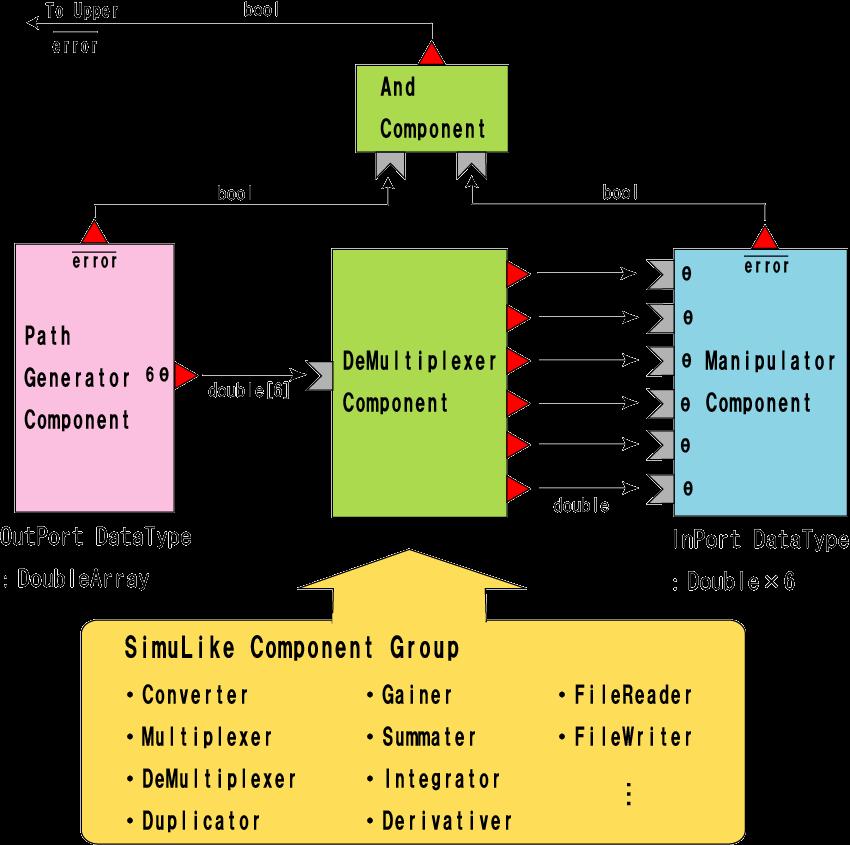
本モジュールは、冗長性を持つロボットアームにおいて、ユーザが指定する 手法で冗長自由度を決定し、現在位置との偏差を出力するコンポーネント です。
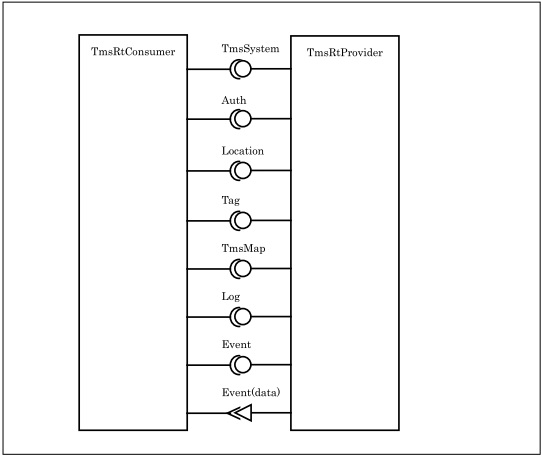
●利用にはタウンマネジメントシステムが必要です。コンポーネントに同梱しております。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
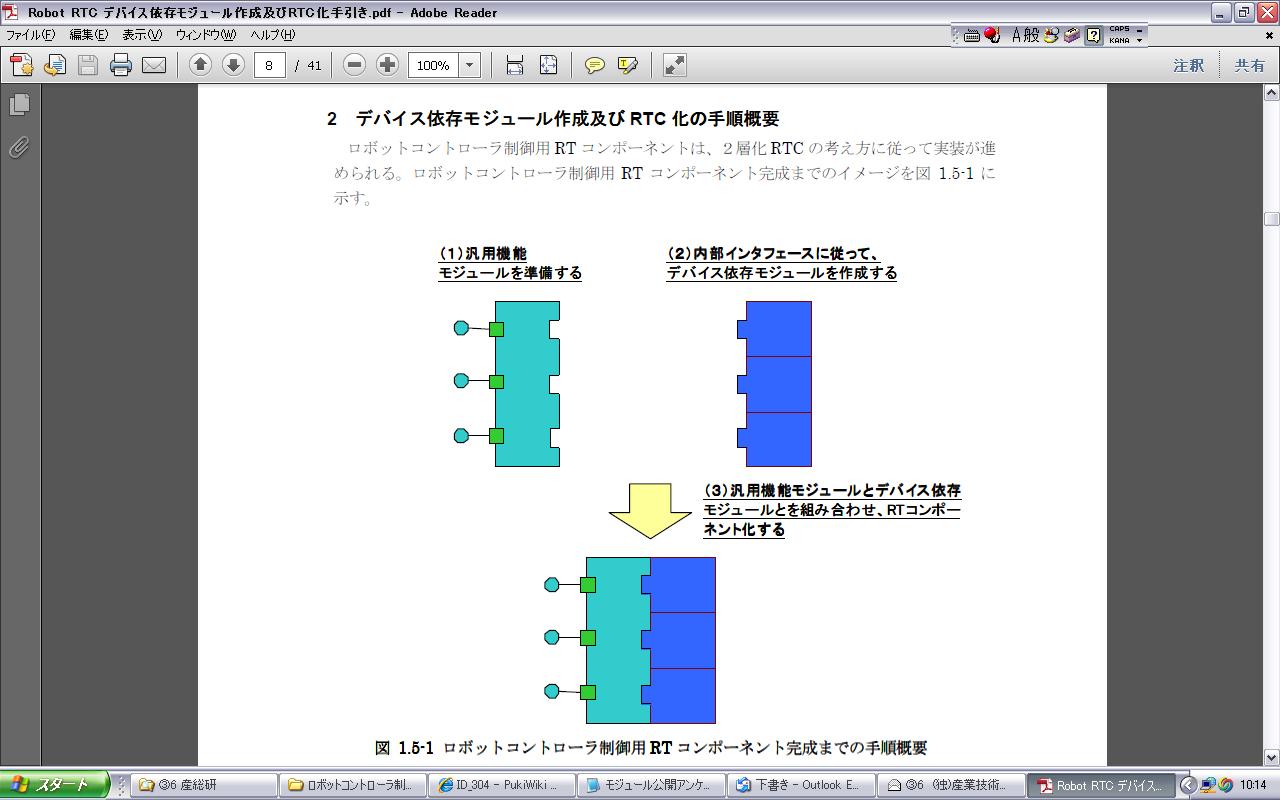
このコンポーネントは、ロボットコントローラ制御用RTCの共通インタフェースモジュールです。ACT共通インタフェース対応版です。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


RTミドルウェアの学習を目的とした安価で入手容易なロボット上での実行環境
概要