Image processing RTCs
window_captcha(ウィンドウキャプチャコンポーネント)
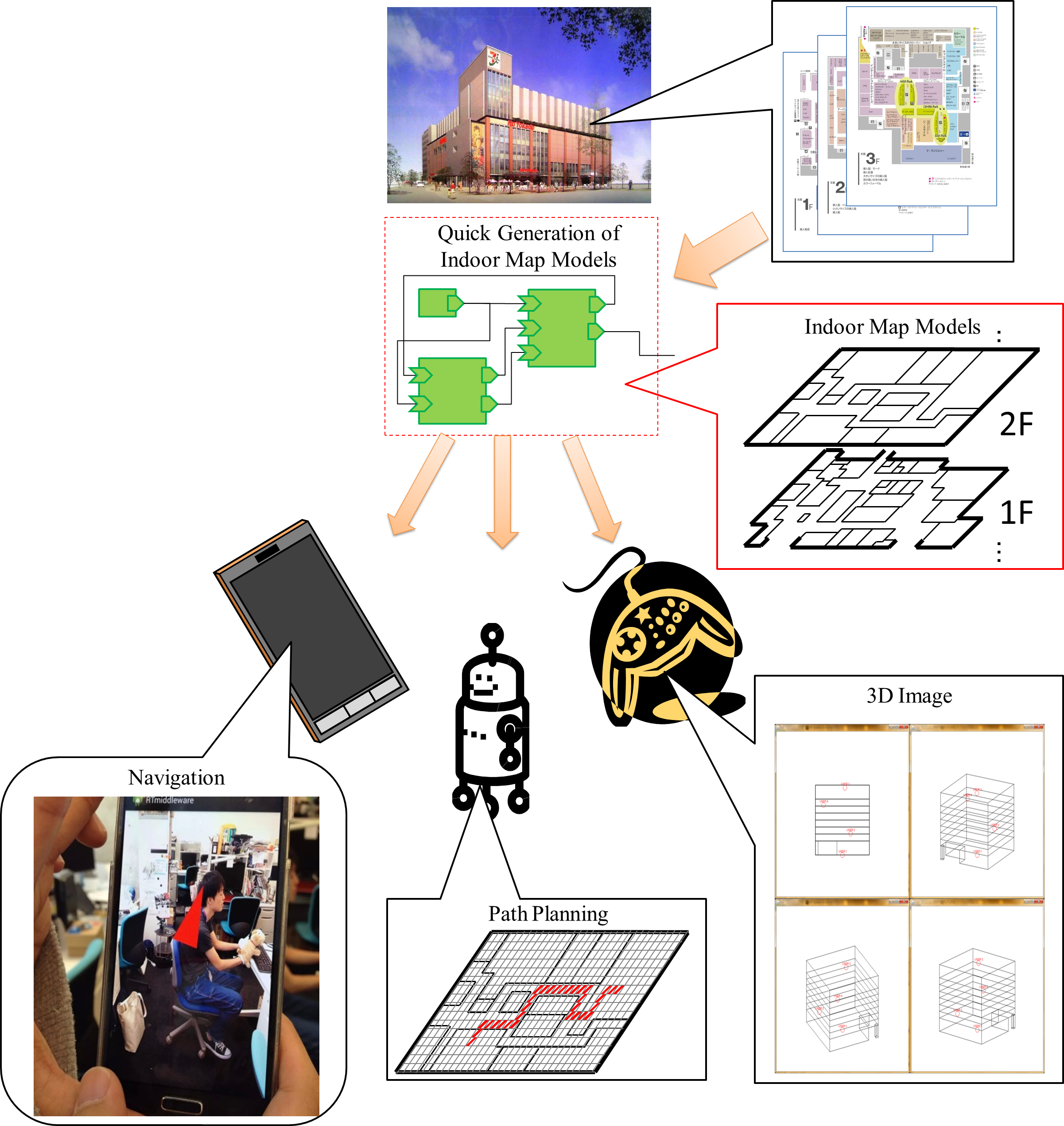
MIND STORMとRGB-Dカメラを用いた3Dモデルの作成可能なRTCを公開します。
ドキュメント詳細は以下のリンク先で公開しています。 http://www1.meijo-u.ac.jp/~kohara/cms/si2019-fukao
授業中に集中せず読書やスマホ,寝ている学生は少なくありません. 授業に集中してもらうため,また,先生の学生を注意する手間を省くために注目度を測定するRTCを開発しました. 教室内をカメラで見回し,最初に検出した顔と指定時間後に検出した顔の数から注目度を計算します. 注目度が低い場合は警告としてアラームを鳴らすことができるため,学生の注目度を上げることが可能です. 注目度は静止画像に載せて保存されるので後から様子を視覚的に確認することができます.
画像処理はロボットに必要不可欠な機能です. カメラ画像の取得や出力方法を個々のユーザーに合わせることが必要となります. これまでに開発された追尾カメラ,写真撮影サービスを利用して,画像の多目的利用に対応できる画像出力RTCを開発しました.
ロボット動作時の信頼性を高めるRTCを公開する。 また、昨年度のRTMC2013で公開した「写真撮影RTC群」について 実際のデモンストレーションでの動作を通して得た問題点を改善するRTCを公開する。
コンポーネントの使い方はzipファイル内のreadme.txtに記述してあります.
他にもHI-brainホームページには様々なコンポーネントが登録されています. OpenCV関数群を簡単にRTC化する「OpenCV-RTC」や,網膜モデルなど様々な視覚数理モデルRTCが入っているUbuntuインストールディスクなどが提供されています. ※利用時には新規GitHubアカウントの作成を推奨します. ※モデルRTCを簡単に共有可能とするため,GitHubアカウントに登録されたプロジェクトが自動的にHI-brainに読み込まれます.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





顔認識を用いた遅刻摘出システム
概要
現代では、様々なものがデータベース化されているが、学校生活においては未だに紙ベースで管理されているものも多くある。そのうちの一つに「遅刻」が挙げられる。そこで、顔認証システムを用いた時間通りに遅刻を検出するシステムを作ろうと考えた。このシステムを用いて今後は、遅刻を検出するだけでなく、帰る際に両親に連絡を送り不審な人が侵入した際により早く対応することができるようにしていきたい。システム概要
- 顔認証
- 遅刻確認
- 通知
cam_image(写真を撮る)コンポーネント群
face_cut(顔認識・切り取り)