Mobile platform RTCs including mobile robot controller, biped robot controller etc.
このコンポーネントは関東自動車工業株式会社の「Patrafour」(パトラフォー)用の 制御コンポーネントです。
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
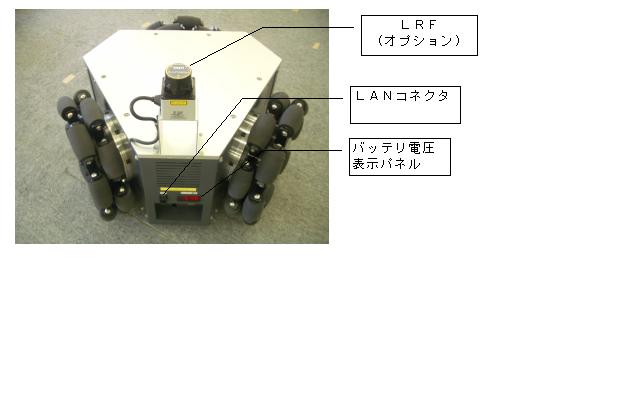
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス ロボット)を操作するモジュール群です。
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。 ●リファレンスロボットの実行にはRTC-CANopenが必要となります。
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に 帰属します。 ・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の 場合は別途ご相談下さい。 なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。
このコンポーネントはMobile Robots 社のロボット用の 制御コンポーネントです。
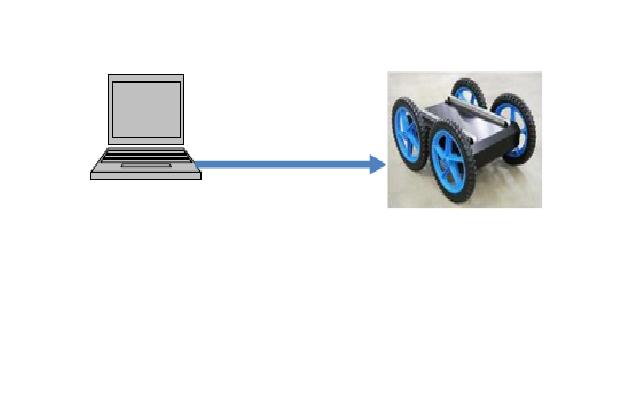
ビュートローバーRTCは、OpenRTM-aistを用いたRTコンポーネント開発を学習するための開発キットです。ロボット本体は、USB接続で制御するH8マイコンボードを搭載した台車型ロボット、及びミニノートPCで構成されています。
本コンポーネントはActivateすることによって,UDPでブロードキャストされている環境中のロボットの状況を受信し,接続するロボットを選択することが可能である.接続後はTCPによるソケット通信で目標速度・角速度を送信し,オドメトリの値を受信する.
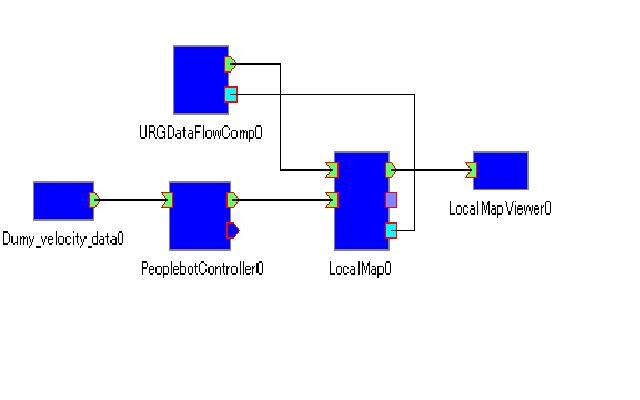
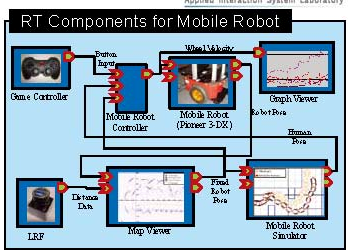
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

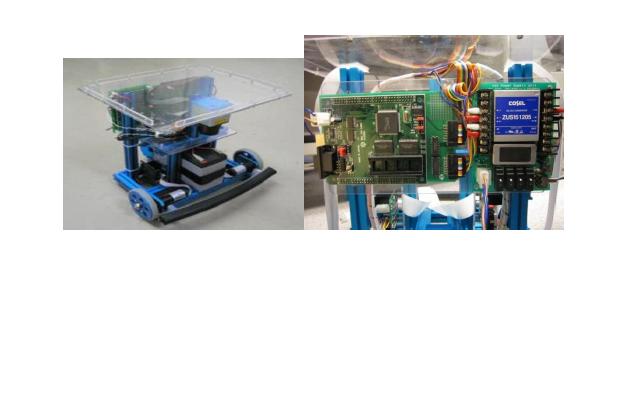


関東自動車工業株式会社「Patrafour」(パトラフォー)用制御コンポーネント
概要
このコンポーネントは関東自動車工業株式会社の「Patrafour」(パトラフォー)用の
制御コンポーネントです。
ライセンス
修正BSDライセンスを適用しています。
連絡先
豊橋技術科学大学 情報・知能工学系
rtc@aisl.cs.tut.ac.jp
〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1
TEL: 0532-44-6826
URL: http://www.aisl.cs.tut.ac.jp/