Mobile robot navigation RTCs
AGVによる部品運搬とHIROによる物体操作の実行順序を制御して 連携作業を行うモジュール 2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。 2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
国立大学法人 豊橋技術科学大学 行動知能システム学研究室 〒441-8580 豊橋市天伯町雲雀ヶ丘1-1 email: rtc@aisl.cs.tut.ac.jp
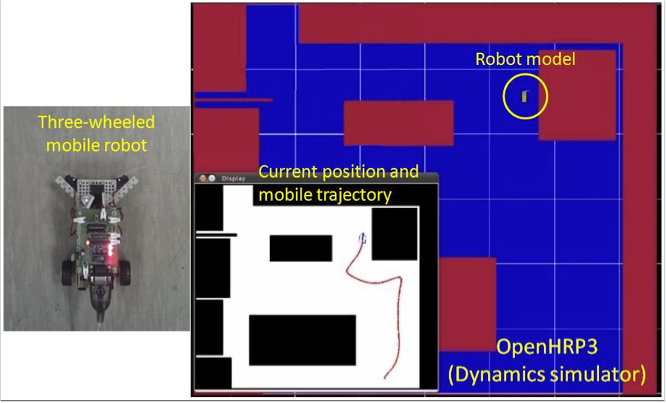
本コンポーネント群はOpenHRP3のシミュレータを用いて、車体速度を入力とする対向二輪型の移動ロボットを経路に沿って走行させる移動機能を統合したモジュール群です。
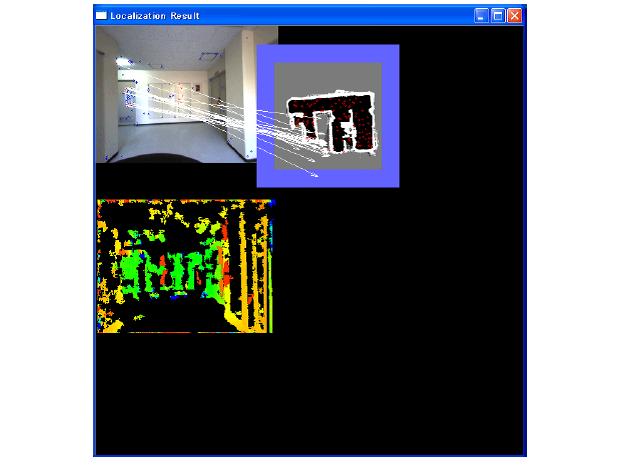
このコンポーネントは、データポートから入力された距離データとロボットの 移動量を用いて大域地図上でのロボット自己位置を推定します。 大域地図(障害物存在確率地図)は、サービスポートからコンポーネント 起動時に受け取ります。
私たちは各行でロボットの動きの種類とそれのパラメータが含まれるモーションスクリプトを取得し,処理する一つのRTコンポーネントを提案します.本モーションスクリプトは人間にサービスを提供するようHRP-4を制御するために使用する.モーションスクリプトの行は任意の逆運動学の解とモーションプランナーで求められる解法から得られる.実験ではボトルからグラスに水を注ぎ,人に手渡す簡単なサービスを行う.
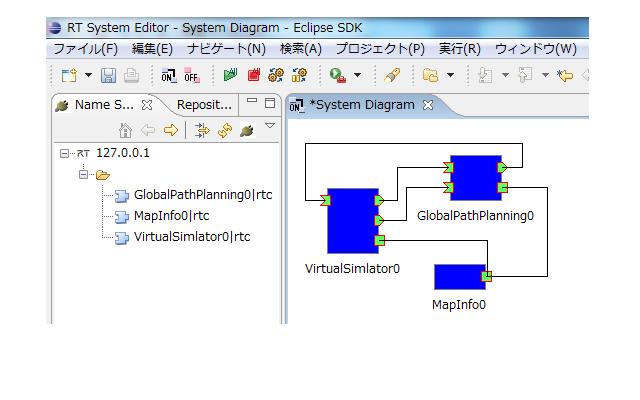
大域的経路計画モジュールは、障害物を回避しながら指定地点への大域的な準最適経路を計画する コンポーネントです。 設定されている環境情報から準最適経路を算出し、現在位置から目標地点への中間経路を求めます。 間に壁があるなど複雑な経路であっても、その地点への経路を大域的に探し出し中間経路を出力します。
商用以外の利用の場合、修正BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
独立行政法人 産業技術総合研究所 e.yoshida@aist.go.jp 〒305-8568 茨城県つくば市梅園1-1-1 つくば中央第2 知能システム研究部門AIST-CNRS ロボット工学連携研究体
RTC-CANopenを利用する上でのリファレンスとするために開発したロボット(リファレンス ロボット)を操作するモジュール群です。
●リファレンスロボットはテクノクラフト社のBeegoを対象に設計してあります。 ●リファレンスロボットの実行にはRTC-CANopenが必要となります。
・RTC-CANopenリファレンスマニュアルの著作権は,芝浦工業大学水川研究室に 帰属します。 ・これらのコンポーネント群は,非営利目的での使用及び改変自由ですが,商用利用の 場合は別途ご相談下さい。 なお,本モジュール群を使用して発生したいかなる障害についても責任を負いません。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



HIRO-AGV統合制御モジュール
概要
AGVによる部品運搬とHIROによる物体操作の実行順序を制御して
連携作業を行うモジュール
2012年2月24日にコンポーネント本体とマニュアルをアップロードしました。
2012年3月24日に,バグを修正した状態機械RTCをアップロードしました。
注意事項
下記ライブラリを使用しています。
●OpenCV 2.1
ライセンス
修正BSDライセンスを適用しています。
連絡先
国立大学法人 豊橋技術科学大学
行動知能システム学研究室
〒441-8580 豊橋市天伯町雲雀ヶ丘1-1
email: rtc@aisl.cs.tut.ac.jp