このコンポーネントは、Point Grey Research社製 IEEE-1394bカメラ(Flea2)2台を1つのステレオカメラとして扱い、最大2つのステレオカメラを制御する機能を有する。
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
OpenRTMによるWiiリモコンからのロボットアームコントロール
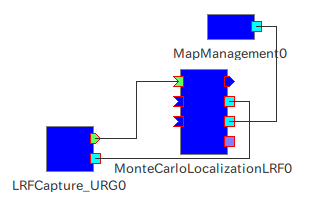
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
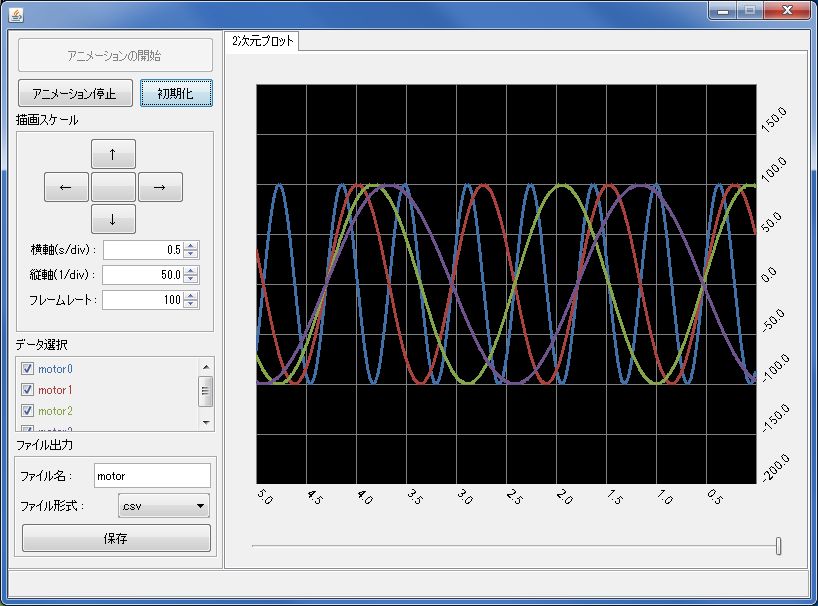
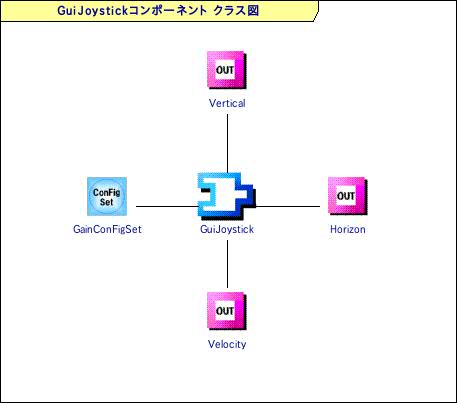
本プログラムは、GUIを利用したジョイスティックシミュレートコンポーネント です。x-y座標上でクリック(ドラッグ)した任意の座標値を出力します。 付加機能としてロボット走行指令のためのTimedVelocity型の値を出力 することも可能です。
このコンポーネントは、Point Grey 社製ステレオカメラ 「Bumblebee2」から画像およびステレオ距離データ を取得するためのコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.1 およびOpenCV 2.2 ●Bumblebee 2 BB2-08S2C-25(XGA,カラー,画角110 度) ●FlyCapture v1.7(カメラ付属の画像取得ライブラリ)) ●Triclops v3.2(カメラ付属のステレオ処理ライブラリ)
修正BSDライセンスを適用しています。
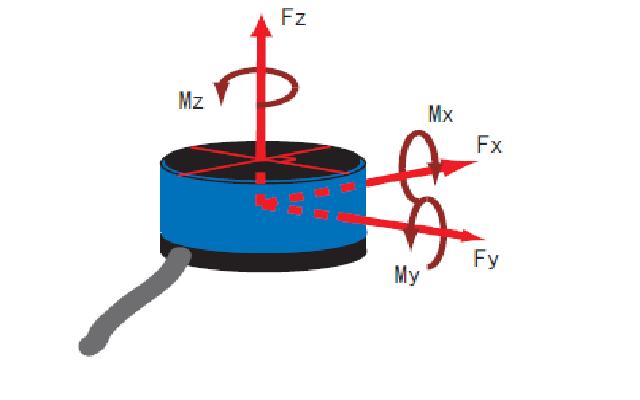
本コンポーネントは、ニッタ株式会社製の力センサ「IFS-70M35A25-M50B」のRTコンポーネントであり、 データポートやサービスポートから力とモーメントを出力します。 対応OS:Vine Linux + ART-Linux で動作を確認済みです。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





Recovery_Function_of_Target_Disappearance_for_Human_Following_Robot
概要
特徴
仕様
コンポーネント群
ソースコード