※オブジェクト、およびドキュメントは以下のURLから入手できます。
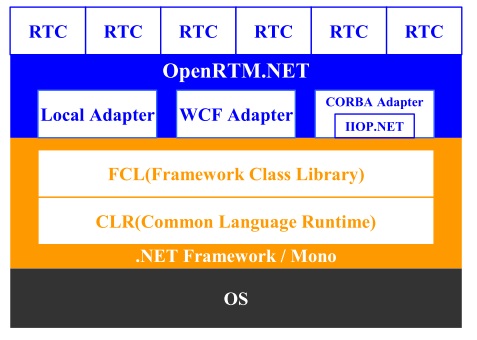
OpenRTM.NETは、Microsoft .NET Framework上で動作するRTミドルウェア実装です。 OpenRTM.NETは以下のような特長を持っています。
PyRTSeamは、RTコンポーネント(RTC)を容易に開発するためのライブラリです。 独立行政法人産業技術総合研究所が開発したRTミドルウェア実装である OpenRTM-aist-Python上で動作します。 PyRTSeamを利用すると、RTCのソースコードが従来よりも簡潔になり、 可読性が向上します。 これにより、RTCの開発効率、保守性が向上します。
MITライセンスを適用しています。
弊社の自社サイトで公開しています。
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表します。
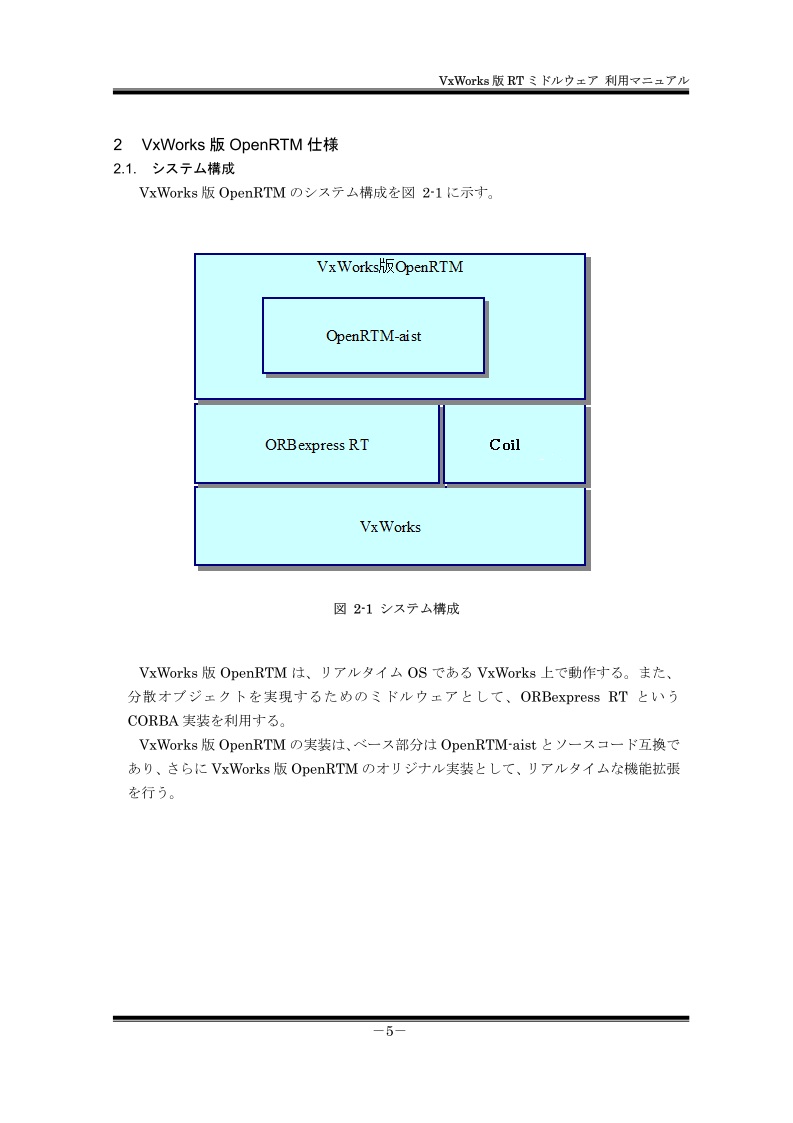
・OpenRTM-aist-C++をリアルタイムOSであるVxWorks上に移植 ・有償のCORBA実装であるORBexpress RTを利用 ・VxWorks5.5.1、VxWorks6.4に対応
利用にあたっては、H/W, S/W に応じた利用手順がありますので まずは株式会社セックまでご連絡下さい。
EPLにて公開予定です。 詳しくは、下記までご連絡をお願い致します。
弊社の自社サイトでの公開を予定しています。 詳しくは、下記へご連絡願います。
JavaでRTコンポーネントをプログラミングするためのライブラリ。Windowsインストーラとビルド済みのjarファイルが用意されています。
OpenRTM-aist-C++でDDS(Data Distribution Service)を利用するトランスポートです。DDSはデータ中心で、チャネルでデータを配布します。得にリアルタイムシステムに快適です。
DAQ-MiddlewareはOpenRTM-aistを基盤とした高エネルギー加速器研究機構(KEK)や大強度陽子加速器施設(J-PARC)等の実験データ収集(DAQ)システムで使用するためのソフトウェアフレームワークである。
RTコンポーネントを拡張したDAQコンポーネントによる汎用で柔軟なDAQシステム構築を目指している。 現在、J-PARCの物質・生命科学実験施設(MLF)の複数の実験装置で稼働中。
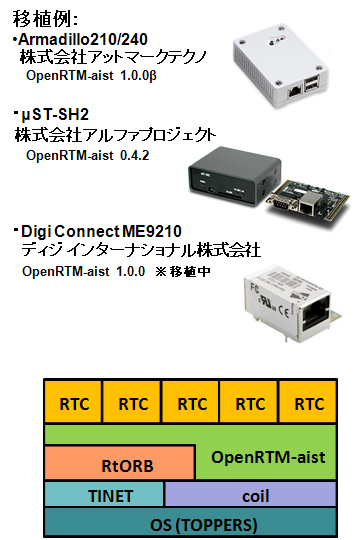
組込み向けRTミドルウェアとして、ITRON仕様に準拠したTOPPERS-OSに対応。
基盤ロボット技術活用型オープンイノベーション促進プロジェクトにて開発した組込み向け軽量RTミドルウェアです。
UNDER CONSTRUCTION ...
OpenRTM-aist-C++用のトランスポートです。共有メモリポインターによってデータをトランスポートします。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

OpenRTM on T-Kernel
概要
T-Kernel上で動作するOpenRTM-aistです。詳しくは、以下のURLを参照してください。
http://sourceforge.jp/projects/rtm-t-kernel/releases/54680/
ライセンス
LGPLライセンスを適用いたします。連絡先
NECソフト株式会社openrtm-tkernel@necsoft.com
Download
※オブジェクト、およびドキュメントは以下のURLから入手できます。