Recovery_Function_of_Target_Disappearance_for_Human_Following_Robot
Recovery_Function_of_Target_Disappearance_for_Human_Following_Robot
投稿日時:
月, 2012-11-19 23:20
概要
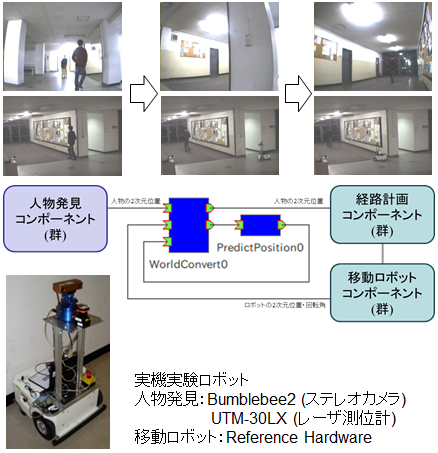
- 対人追従ロボットが曲がり角において人物を見失った場合,人物の軌道とその後の位置を予測する.
- そしてロボットは,その位置を目的地として移動することで見失いを回復する.
特徴
- 曲がり角での追従対象の見失いを克服
- データポートの型に独自定義型を採用
- 人物の軌道モデルとして対数関数を使用
仕様
- 言語: C++
- OS:Linux(Ubuntu 10.04)
コンポーネント群
- WorldConvert:人物位置を記録する
- PredictPosition:見失い後の位置を予測する
ソースコード
- ソースはhttp://www.rs.noda.tus.ac.jp/~hmlab/Prediction.htmlからダウンロード可能です。
問合先(メールアドレス):
masahito.ota.tus@gmail.com
最終更新日時:
火, 2012-11-20 18:49
コメント
画像は本文ではなく Screenshots のところにURLを入力して貼り付けるときれいにレイアウトされますよ。
東京理科大学の太田です。 返信が大分遅れてしまいました、申し訳ありません。 ご指摘いただいたおかげできれいにレイアウトができました。 ありがとうございます。
東京大学 矢口です. お世話になっております.
いくつか不明な点がありましたので,教えていただきたいのですが,
人物発見コンポーネント群, 経路系各コンポーネント群と呼んでいるものは どこから入手すればよろしいでしょうか?
また,RHを前提とされているようですが, こちらの手元の異なる移動ロボットで構成しようと思っています. どのようなコントローラを組めばよいでしょうか?
最後に,実機を用いずに試す方法があると より多くの方に評価いただけると思いますが, どのようにするのが一番簡単でしょうか?
以上,よろしくお願いします.
お世話になっております。東京理科大学 太田です。学会へ参加していたため返答が遅くなってしまいました、申し訳ありません。
質問していただき、ありがとうございます。以下が返答になります。
・人物発見コンポーネント群等の入手先
本コンポーネントと接続が可能である各コンポーネント群は、すべて本研究室HPにて掲載しています。
http://www.rs.noda.tus.ac.jp/hmlab/rtcomponent.html
お手数ですが上記URLへとアクセスしていただき、ダウンロードをお願いいたします。
人物発見コンポーネント群として用いるものは Bumblebee, Topurg_LRF, 人発見モジュール(LRF), 人発見モジュール(stereo camera), 対人追従モジュール群
経路系各コンポーネント群として用いるものは 局所的経路計画モジュール です。
・他の移動ロボットとの接続
移動ロボットへの接続は、経路計画モジュールを経由して行ってください。本研究室HPにて掲載している局所的経路計画モジュールを使用する場合、
速度、角速度を受け取るinportとしてTimedVelocity型あるいはTimedVelocity2D型と、自己位置を送るoutportとしてTimedOdometry型あるいはTimedPose2D型をもつコントローラをご用意ください。
・実機を用いずに試す方法
現在、本コンポーネント群は実機においてのみ動作を確認しています。なので、申し訳ないですが実機を用いずに試す方法は検討していません。
以上です、何かご不明な点があれば再度ご連絡ください。