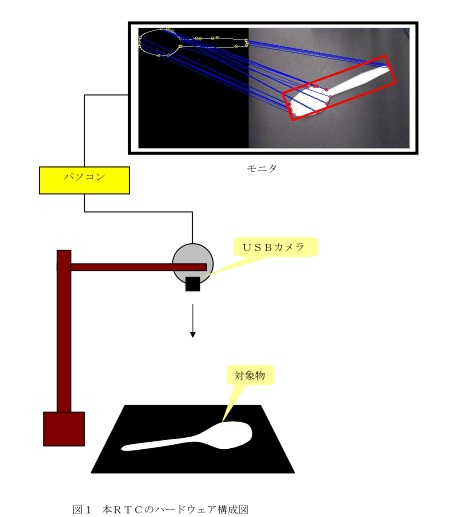
コンポーネントは、共通Sense I/F※を備えた画像認識コンポーネントで カメラで物体(スプーン、ナイフなど)の部分エッジ(曲線)を検出し 予め登録した曲線と照合して、その物体の重心位置・姿勢を算出するものである。
バイナリー提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
株式会社 東芝 研究開発センター 機械・システムラボラトリー 〒212-8582 川崎市幸区小向東芝町1 Tel :044-549-2193 Email:atsushi.sugahara@toshiba.co.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
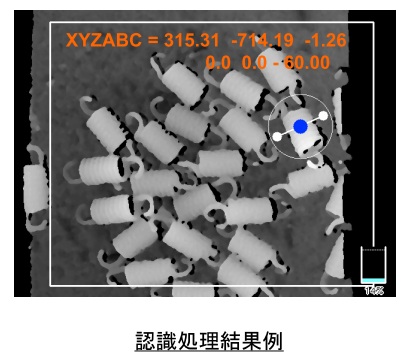
アクティブパターン投光型3次元レンジファインダー(三菱電機(株)Micro3D) センサーに対応して3次元情報及び濃淡画像情報を用いて部品ピッキングのための 物体認識処理を行うモジュールです。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しい内容については、下記へご連絡願います。
三菱電機株式会社 先端技術総合研究所 業務部 技術情報課 http://www.MitsubishiElectric.co.jp/corporate/randd/inquiry/index_at.html お問い合わせ窓口) ATC_webmaster@ra.MitsubishiElectric.co.jp
このコンポーネントは関東自動車工業株式会社の「Patrafour」(パトラフォー)用の 制御コンポーネントです。
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
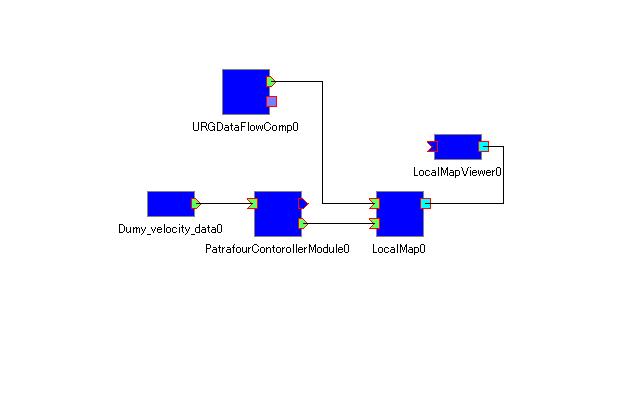
開発したRTCは人を含む障害物と目標のワールド座標系における位置と,ロボットの絶対座標系における位置および向きを受け取り ポテンシャル法の計算を行う.計算されたポテンシャルデータはロボットの移動方向と速度,周辺地図情報の出力に利用される.
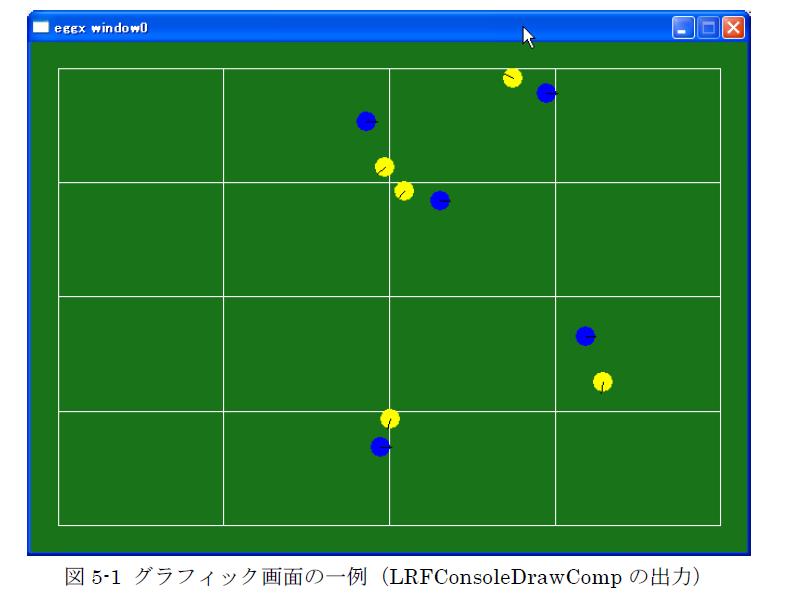
障害物の運動推定を行なうコンポーネントです。 障害物の運動推定コンポーネントの動作を確認するために,円運動をする 模擬的な障害物の位置情報を出力するコンポーネントと運動推定コンポー ネントの入力と出力を二次元座標上に描画するコンポーネントと組み合わせて 実行します。
商用以外の利用の場合、EPLライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
大阪電気通信大学 総合情報学部 メディアコンピュータシステム学科 升谷 保博 E-MAIL: masutani@isc.osakac.ac.jp 〒575-0063 大阪府四條畷市清滝1130-70 TEL&FAX: 072-876-5107
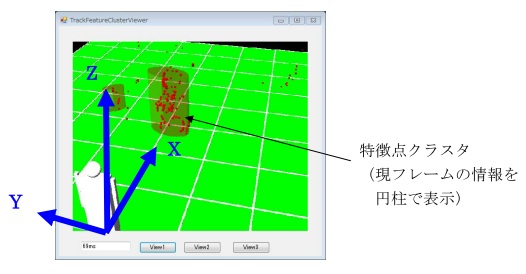
コーナー、エッジの特徴点のクラスタリングを行い 3次元位置を計測するコンポーネント 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。
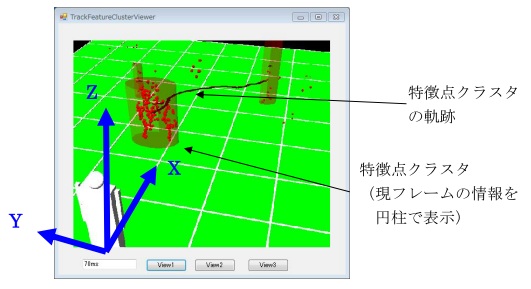
コーナー、エッジの特徴点のクラスタリングを行い そのクラスタの追跡を行なう。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
外界センサの情報から障害物情報を生成するコンポーネントです。
- Urg_to_obstacles 測域センサ用障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


邪魔にならない掃除ロボット
概要