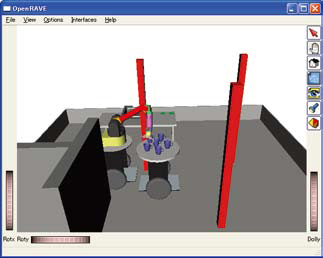
ロボットアームなどのマニュピュレーションを行うオープンソースであるOpenRAVEに機能をRTC経由で利用することができる。
Eclipse Public License - Version 1.0
多関節ロボットの構造を簡単に設計するためのツールであり、他のRTコンポーネントからの入力によりロボットの動作確認等ができる。
LGPL
ロボットプログラミングの学習では実機とシミュレータを切り替えることのできる教材が有用である.大阪電気通信大学では,RTミドルウェアとChoreonoidを利用してそのような教材を構成し授業を行っている.しかし,それらの標準のソフトウェアだけでは,操作が煩雑で学習の妨げになりやすく,実機を複数人で共用する場合にトラブルが起こりがちであった.そこで,rtctreeとTkinterを利用したGUIの支援ツールを開発し授業で活用した.本発表では,それを発展させ,設定ファイルを書き換えることによって様々な実機とシミュレータの組み合わせに利用できるように汎用化したツール,ロボットプログラミングマネージャ(RPM)を紹介する.
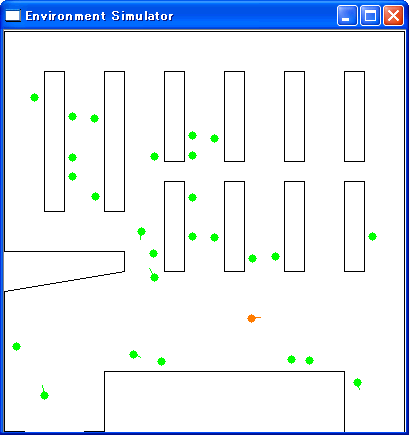
本システムは、電気通信大学知能システム学講座に設置されている エアホッケーロボットを使った対戦アルゴリズム開発を促進するものであり、 以下の4つのコンポーネントで構成されています。
これらのコンポーネント群を利用して対戦アルゴリズムRTCを作成することで、 対戦アルゴリズムの開発や比較検証を容易に行うことができます。
OpenRTM上でMongoDBにアクセスするためのコンポーネント
センサーやロボットから出力されたデータをMongoDBに格納します
Kobuki,NAVIO+,Kinect用に作成
任意のコンポーネント用に作成するためのドキュメントも用意
ZIPファイル
モーションエディタ/シミュレータ
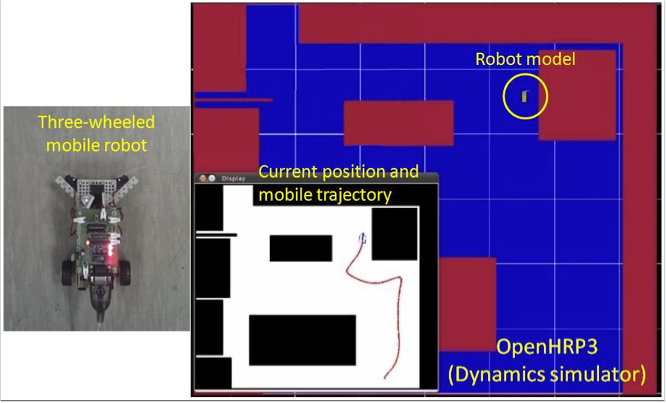
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


PA10アーム分解運動速度制御RTC群
概要
三菱重工業製汎用ロボットPA10用の分解運動速度制御動作(手先座標動作指令)を実現するRTC 群です。
アームベース座標系内での手先位置を与えて制御することが可能であり、
アームの構造に合わせた順運動学RTCとヤコビ行列を解くRTCなどにより
構成される。汎用的なセンサーベースの作業システムで用いることを想定し、
ビジュアルサーボ力覚制御の導入など、機能拡張が可能である。
注意点
Windows版は、下記ライブラリを使用しています。●VPython(シミュレータ動作環境)、三菱重工業製PAライブラリ(実機動作環境)
Ubuntu版については、
●本モジュールでは実機動作環境は用意していません。
●依存ライブラリとして、VPython(シミュレータ動作環境)を使用しています。
ライセンス
商用以外の利用の場合、修正BSDライセンスが適用されます。