Point Cloud Libraryのコンポーネントラッパー群です。ポイントクラウドの生成、処理及び表示をするコンポーネントを提供します。簡単に新しいポイントクラウド処理コンポーネントを作るためのベースクラスも含めています。他のコンポーネントでポイントクラウドのデータ型を使うために、データ型もIDLをライブラリとして提供します。
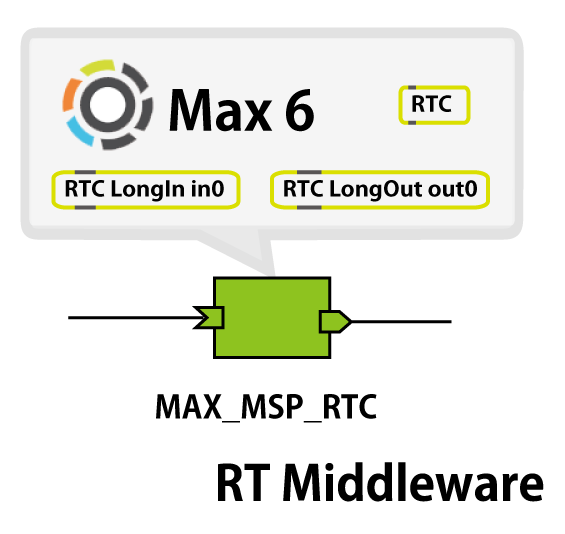
RTCGatewayはCycling’74社のMax(MAX/MSP)とOpenRTM-aistとの間でデータ交換を行うことができるプラグインです。MaxのExternalオブジェクトとして実装されており、Max側ではRTCオブジェクトとして、RTM側ではRTコンポーネントMAX_MSP_RTCとして扱われます。 Max(MAX/MSP)はシンセサイザーのコントロールのためのビジュアルプログラム環境として開発されましたが、現在はリアルタイム音響処理、映像処理・生成、MIDI・様々なデバイスのコントロールに対応しています。オブジェクトと呼ばれる特定の機能を持った部品同士を線でつなぐ(Patch)ことでプログラミングができるようになっており、音楽表現、舞台演出、メディアアートなどのインタラクティブなシステム開発にとって強力なツールとなっています。 RTCGatewayを導入することでMaxで主にロボット用に開発されたRTコンポーネントを比較的簡単に利用することができます。例えばロボットを用いたメディアアート作品の制作の際、音や映像といったインタフェースとロボット制御との間でのデータ交換を行うことも可能です。
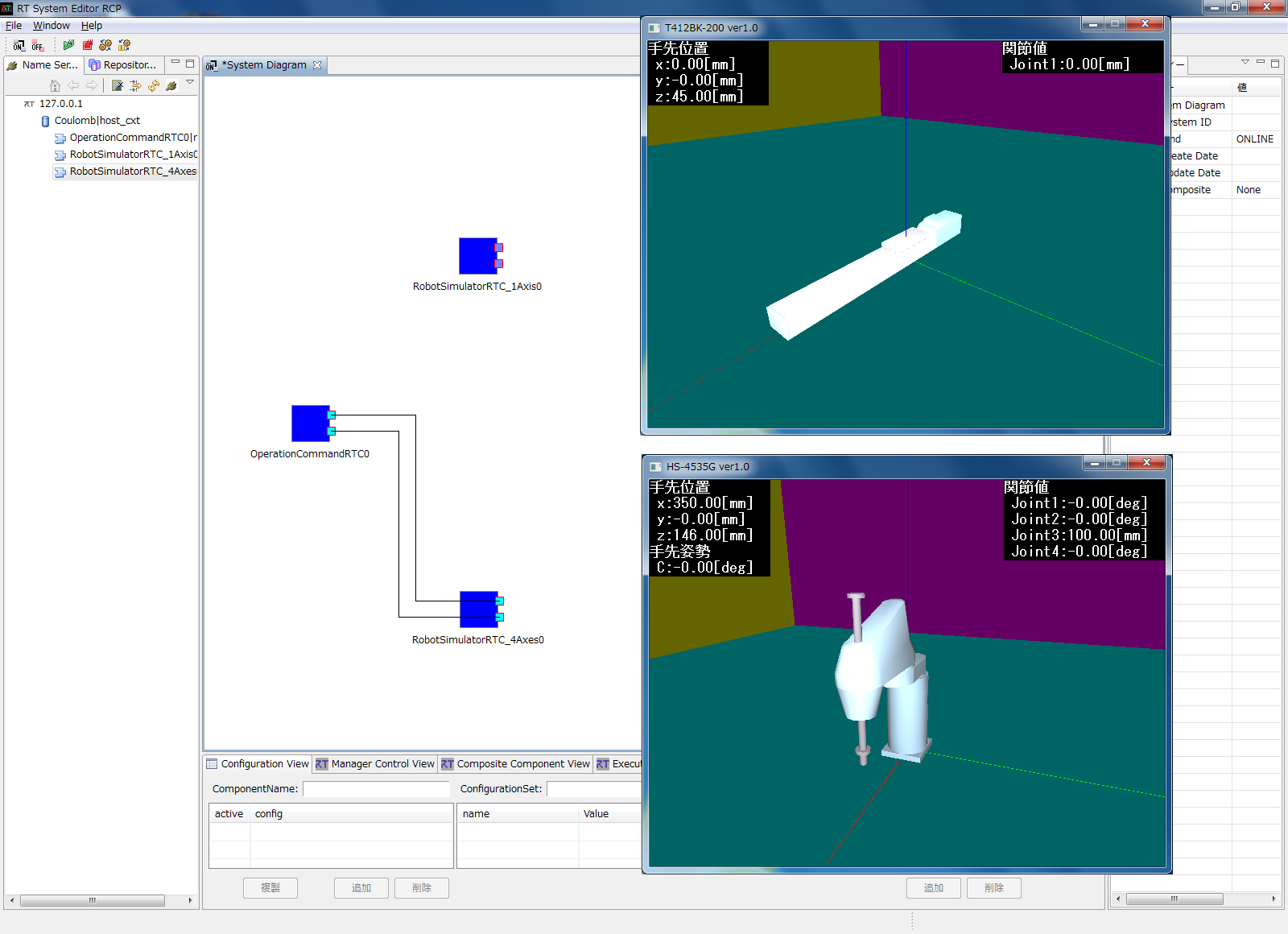
RT-Middlewareによるコンポーネント指向ロボット開発により、ロボットモデル、低レベルのコンポーネント、高レベルのコントローラコンポーネントなど、以前より明確にロボット開発の役割を分担することが可能になった。この分担されたコンポーネント指向による開発作業において重要なのは、自分が集中すべき、得意な役割以外は、気にすること無く研究・開発が可能な点である。本ツールは、モデルの骨組みや抽象動作パターン、クラウドなどの概念を利用することでロボットシステムの分担された各工程をより独立・再利用化し、それぞれの研究・開発を促進するアプローチ方法、及びそれらを機能的、視覚的にサポートするツールを提供する。
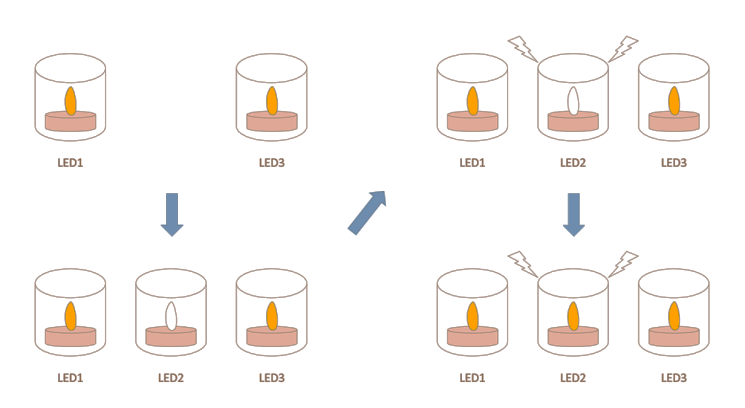
Webコンテンツに設置しているソーシャルネットワークサービス(SNS)のボタンの新しい反応を提示するデバイスの開発を行った。コンテンツの反応の取得には各サービスによって方法が異なっており、仕様変更により様々な反応の取得方法が提案されている。 それに伴い、RTミドルウエアを用いて効率的にデバイスを開発を行った。
代表的なソーシャルネットワーキングサービス(SNS)であるTwitterに投稿を行えるコンポーネントです。 これによって、センサを搭載したロボットが自身の状態をSNSに投稿し、多くの人々がロボットと接する機会が増えるでしょう。
特に近年WEBのサービスとして音声認識や画像検索をはじめとした技術の利用が可能となってきています。 これによりWEB上の膨大な知識を利用することが可能となります。googleで提供するサービスのうち、音声認識や音声合成、そのほかの検索サイトによる検索サービスを利用するRTC群を開発しました。
小型ヒューマノイドロボット「NAO」(アルデバランロボティクス)のRTCです. <img src="" width="480" />
このコンポーネントは以下の機能があります. 1. TextToSpeech 2. Motion (Direct Motor Control and Walk) 3. Memory (Sensory data aquisition) 4. Audio 5. Vision 6. Speech Recognition
Launguage : Python Operating System : Mac, Win, Linux Depends : pynaoqi 1.14.5, OpenRTM-aist 1.1 Python version.
近年,ロボット技術や情報技術の発展により,ロボットは産業分野だけにとどまらず,私たちの生活に密に係わる予想される.今までロボットの操作は特別な訓練を受けた人が主であったが,今後社会においてより多くの人々がロボットの操作を行う可能性があるため,今後のロボットには直感的かつ容易な操作方法が望まれる.そこで,人とロボットとのインタラクティブな意思疎通により操作を容易にする研究を行っている.インタラクティブな意思疎通の方法の1つとして指差しに着目し,直感的に物体の位置情報やロボットの移動経路などの入力を行うためのコンポーネントを開発した.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



 " width="480" />
" width="480" />
RTC:PCL
Point Cloud Libraryのコンポーネントラッパー群です。ポイントクラウドの生成、処理及び表示をするコンポーネントを提供します。簡単に新しいポイントクラウド処理コンポーネントを作るためのベースクラスも含めています。他のコンポーネントでポイントクラウドのデータ型を使うために、データ型もIDLをライブラリとして提供します。