サポート #4121
完了hrpsys-baseのreadDataPort関数、writeDataPort関数の改善
100%
説明
ポートプロファイルにデータを格納する機能の廃止のため、hrpsys-baseのrtm.pyで、データ読み込みのreadDataPort関数、データ書き込みのwriteDataPort関数の処理を変更する。
従来は関数が呼び出されるたびにコネクタの接続、切断を行っていたが、一度生成したコネクタを再度利用するように処理を変更する。
ファイル
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
n-miyamoto さんがほぼ9年前に更新
- ファイル data.xlsx data.xlsx を追加
- ファイル readDataPort_test.txt readDataPort_test.txt を追加
- ファイル writeDataPort_test.txt writeDataPort_test.txt を追加
- ファイル readDataPort_test.png readDataPort_test.png を追加
- ファイル writeDataPort_test.png writeDataPort_test.png を追加
- ファイル writeDataPort_test_disconnect.png writeDataPort_test_disconnect.png を追加
- ファイル readDataPort_test_disconnect.png readDataPort_test_disconnect.png を追加
- 進捗率 を 0 から 50 に変更
実装内容¶
一度生成したコネクタを利用するように変更しました。
また、コネクタが外部から切断された場合は自動的にコネクタを再生成します。
connector_list = []
def writeDataPort(port, data, tm=1.0, disconnect=True):
global connector_list
connector_name = "writeDataPort"
prof = None
for p in connector_list:
if p["port"]._is_equivalent(port):
if port.get_connector_profile(p["prof"].connector_id).name == connector_name:
prof = p["prof"]
else:
connector_list.remove(p)
if prof is None:
nv1 = SDOPackage.NameValue("dataport.interface_type", any.to_any("corba_cdr"))
nv2 = SDOPackage.NameValue("dataport.dataflow_type", any.to_any("Push"))
nv3 = SDOPackage.NameValue("dataport.subscription_type", any.to_any("flush"))
con_prof = RTC.ConnectorProfile(connector_name, "", [port], [nv1, nv2, nv3])
#con_prof = RTC.ConnectorProfile("connector0", "", [port], [nv1, nv2, nv3])
ret, prof = port.connect(con_prof)
if ret != RTC.RTC_OK:
print("failed to connect")
return None
connector_list.append({"port":port,"prof":prof})
for p in prof.properties:
if p.name == 'dataport.corba_cdr.inport_ior':
ior = any.from_any(p.value)
obj = orb.string_to_object(ior)
inport = obj._narrow(InPortCdr)
cdr = data2cdr(data)
if inport.put(cdr) != OpenRTM.PORT_OK:
print("failed to put")
if disconnect:
time.sleep(tm)
port.disconnect(prof.connector_id)
for p in connector_list:
if prof.connector_id == p["prof"].connector_id:
connector_list.remove(p)
else:
return prof.connector_id
return None
global connector_list
connector_name = "readDataPort"
prof = None
for p in connector_list:
if p["port"]._is_equivalent(port):
if port.get_connector_profile(p["prof"].connector_id).name == connector_name:
prof = p["prof"]
else:
connector_list.remove(p)
pprof = port.get_port_profile()
for prop in pprof.properties:
if prop.name == "dataport.data_type":
classname = any.from_any(prop.value)
if prof is None:
nv1 = SDOPackage.NameValue("dataport.interface_type", any.to_any("corba_cdr"))
nv2 = SDOPackage.NameValue("dataport.dataflow_type", any.to_any("Pull"))
nv3 = SDOPackage.NameValue("dataport.subscription_type", any.to_any("flush"))
con_prof = RTC.ConnectorProfile(connector_name, "", [port], [nv1, nv2, nv3])
#con_prof = RTC.ConnectorProfile("connector0", "", [port], [nv1, nv2, nv3])
ret, prof = port.connect(con_prof)
if ret != RTC.RTC_OK:
print("failed to connect")
return None
connector_list.append({"port":port,"prof":prof})
for p in prof.properties:
# print(p.name)
if p.name == 'dataport.corba_cdr.outport_ior':
ior = any.from_any(p.value)
obj = orb.string_to_object(ior)
outport = obj._narrow(OutPortCdr)
tm = 0
while tm < timeout:
try:
ret, data = outport.get()
if ret == OpenRTM.PORT_OK:
if disconnect:
port.disconnect(prof.connector_id)
for p in connector_list:
if prof.connector_id == p["prof"].connector_id:
connector_list.remove(p)
tokens = classname.split(':')
if len(tokens) == 3: # for 1.1?
classname = tokens[1].replace('/', '.')
return cdr2data(data, classname)
except:
pass
time.sleep(0.1)
tm = tm + 0.1
return None
def delete_all_connector_list():
global connector_list
for port in connector_list:
port["port"].disconnect(port["prof"].connector_id)
del connector_list[:]
コネクタの名前を一意に決めておいて、get_connector_profilesで生成したIDのコネクタを取得して名前が一致したらコネクタが削除されていないと判定して、そのまま生成済みのコネクタを利用します。※実質的にコネクタプロファイルのnameが空でないかを判定しているだけです。
コネクタが削除されている場合はコネクタの再生成を行います。
動作確認¶
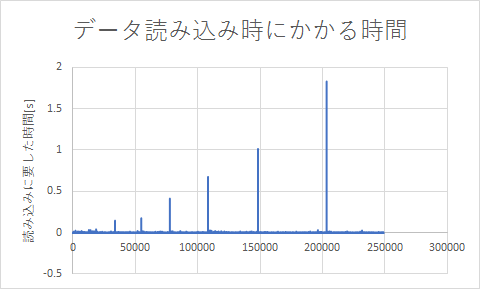
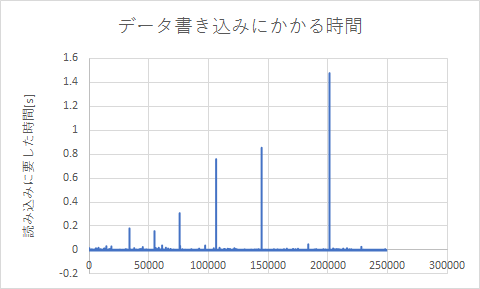
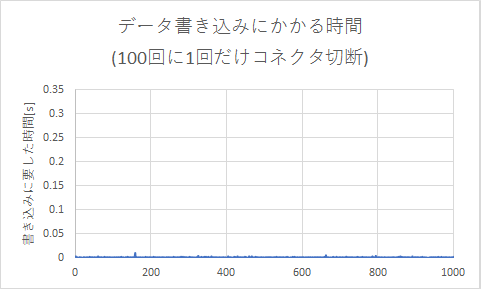
onExecuteでOutPortのwrite関数を周期的に呼び出すRTC1、InPortのread関数を周期的に呼び出すRTC2を起動して、readDataPort関数、writeDataPort関数に要する時間を計測しました。
これで7時間ほど放置した結果は以下のようになりました。


データ書き込み、読み込みに要した時間のほとんどは0.004秒以内ぐらいで処理できているのですが、1時間に1回程度処理に大きな時間がかかる現象が発生しています。原因は特定できていません。
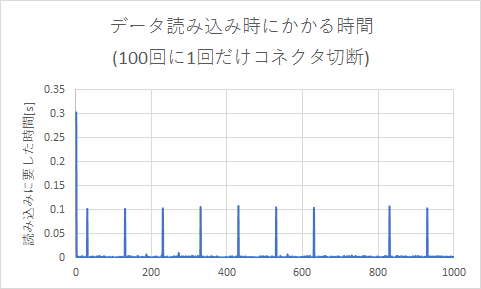
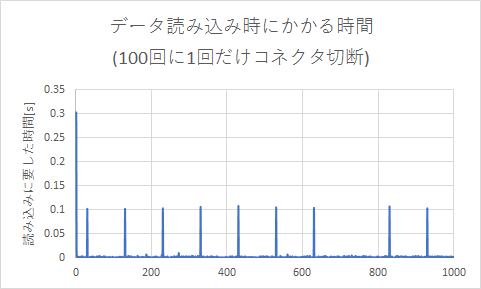
コネクタが外部から切断される場合もあると考えて、コネクタを周期的に切断して動作を確認してみました。結果は以下のようにコネクタ切断時は時間がかかるのですが、それ以外は0.004秒以内ぐらいで処理できています。


n-miyamoto さんがほぼ9年前に更新
- ファイル readDataPort_test_cpp.png readDataPort_test_cpp.png を追加
- ファイル writeDataPort_test_cpp.png writeDataPort_test_cpp.png を追加
- ファイル writeDataPort_test_cpp.txt writeDataPort_test_cpp.txt を追加
- ファイル writeDataPort_test_cpp.txt writeDataPort_test_cpp.txt を追加
- ファイル readDataPort_test_cpp.txt readDataPort_test_cpp.txt を追加
- 進捗率 を 50 から 60 に変更
- C++のRTCと接続しての実験
条件は上の実験と同じ。

突然読み込み、書き込みの時間が激増する現象は発生しませんでした。
以前測ったデータではこれより時間が掛かっていたのですが、OutPort.hでポートプロファイルにデータを書き込む機能を消したら改善しました。
- メモリ使用量
| 経過時間 | rtm.py | testIn.exe | testOut.exe |
| 0 | 8.0MB | 0.9MB | 0.9MB |
| 1時間 | 18.6MB | 0.9MB | 0.9MB |
| 3時間 | 43.9MB | 0.9MB | 0.9MB |
| 4時間30分 | 8.2MB | 0.9MB | 0.9MB |
| 5時間30分 | 9.2MB | 0.9MB | 0.9MB |
| 7時間 | 7.4MB | 0.9MB | 0.9MB |
n-miyamoto さんがほぼ9年前に更新
- ファイル writeDataPort_test_python.png writeDataPort_test_python.png を追加
- ファイル readDataPort_test_python.png readDataPort_test_python.png を追加
- 進捗率 を 60 から 70 に変更
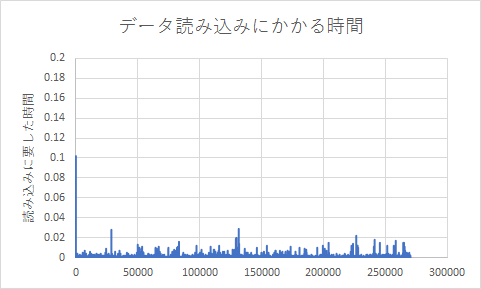
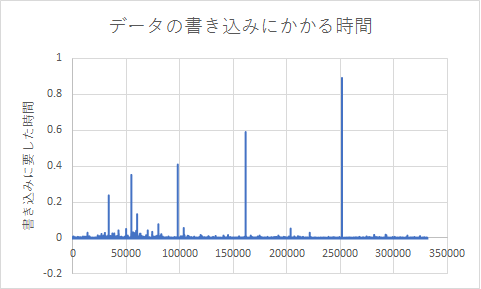
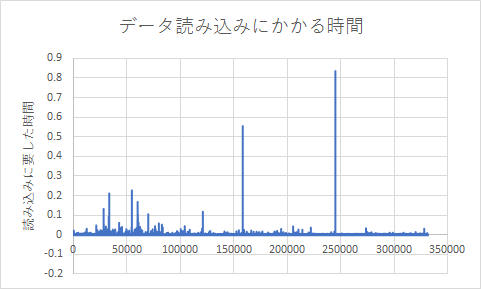
PythonのRTCを9時間30分程動作させてデータ読み込み、書き込みにかかった時間を計測しました。
メモリ使用量は以下の通りです。
| 経過時間 | rtm.py | testOut | testIn |
| 0 | 10.8MB | 11.8MB | 11.8MB |
| 1時間 | 7.1MB | 11.5MB | 11.4MB |
| 2時間 | 9.3MB | 9.0MB | 8.9MB |
| 3時間 | 43.9MB | 62.1MB | 62.1MB |
| 4時間 | 12.7MB | 13.9MB | 14.1MB |
| 5時間30分 | 11.4MB | 12.4MB | 12.7MB |
| 8時間 | 14.7MB | 122.0MB | 13.6MB |
| 9時間30分 | 12.8MB | 12.8MB | 12.4MB |
3時間後ぐらいにrtm.pyのメモリ使用量が大きくなり、その後起動時のメモリ使用量と同程度に戻るのはC++の実験と同じ傾向です。
ただ、8時間後ぐらいにOutPortを持つRTCのメモリ使用量が激増しています。ただこれも少し時間が経過すれば元に戻っています。
n-miyamoto さんがほぼ9年前に更新
- ファイル readDataPort_test_python_memory.png readDataPort_test_python_memory.png を追加
- ファイル writeDataPort_test_python_memory.png writeDataPort_test_python_memory.png を追加
- ファイル memory_py2.txt memory_py2.txt を追加
- ファイル readDataPort_test_py2.txt readDataPort_test_py2.txt を追加
- ファイル writeDataPort_test_py2.txt writeDataPort_test_py2.txt を追加
- 進捗率 を 70 から 80 に変更
PythonのRTCで再度実験。
今度はメモリ使用量も逐一計測してみました。

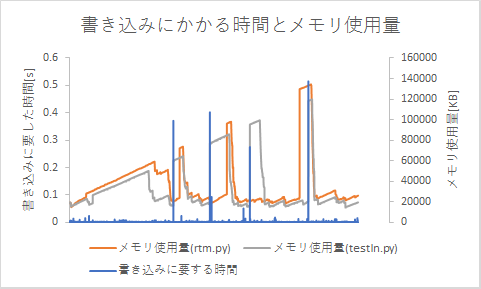
データ読み込み、書き込みの時間が増大したタイミングで、メモリ使用量も突然増えているという結果になりました。
n-miyamoto さんがほぼ9年前に更新
- ファイル writeDataPort_test_disconnect2.png writeDataPort_test_disconnect2.png を追加
- ステータス を 担当 から 解決 に変更
- 進捗率 を 80 から 100 に変更
rtm.pyの変更をプルリクエストしたので、この作業は終了にします。