



Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
頭部ステレオカメラを用いた双腕ロボットによるマニピュレーション作業
概要
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。
具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して
双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。
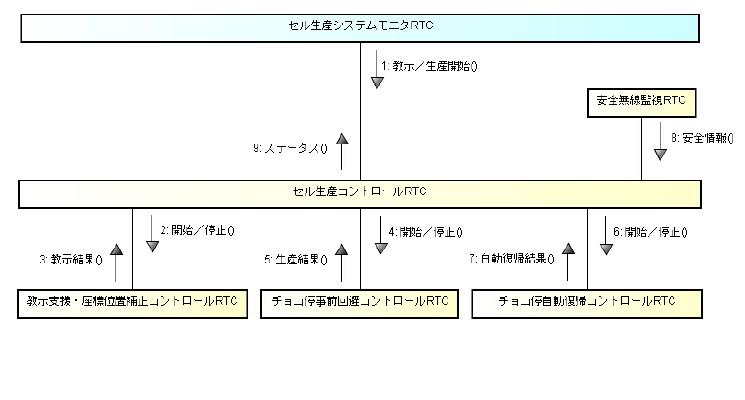
システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を
行うための RTC 群で構成される。