Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
DFITコンポーネント
概要
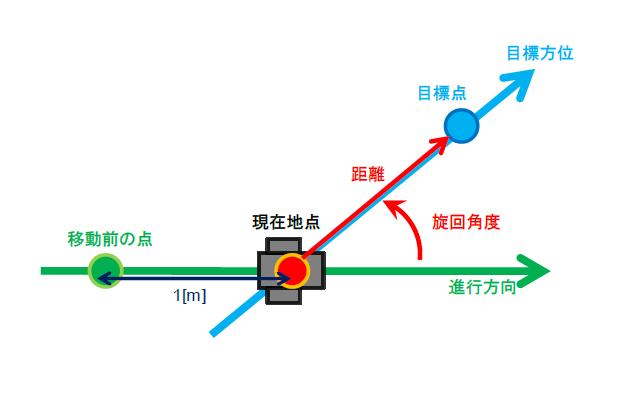
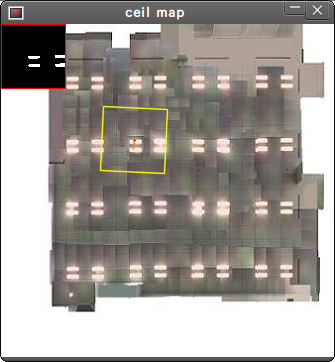
DFITコンポーネントは,ロボットの横に装着した2台のカメラから路面
画像を取得,それぞれの路面がどれだけ動いたかを測定し,その
結果より相対的なロボットの自己位置を推定するRTコンポーネント
です。
ライセンス
・DFITコンポーネントの著作権は,芝浦工業大学ヒューマン・
ロボット・インタラクション研究室に帰属します。
但し,IP7000BDを制御するソースコード及びライブラリの著作権は,
開発元の”日立情報制御ソリューションズ”にあります。
・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での
使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。
なお,本作品を使用して発生した,いかなる損害についても責任を負いません。