DFITコンポーネントは,ロボットの横に装着した2台のカメラから路面 画像を取得,それぞれの路面がどれだけ動いたかを測定し,その 結果より相対的なロボットの自己位置を推定するRTコンポーネント です。
・DFITコンポーネントの著作権は,芝浦工業大学ヒューマン・ ロボット・インタラクション研究室に帰属します。 但し,IP7000BDを制御するソースコード及びライブラリの著作権は, 開発元の”日立情報制御ソリューションズ”にあります。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
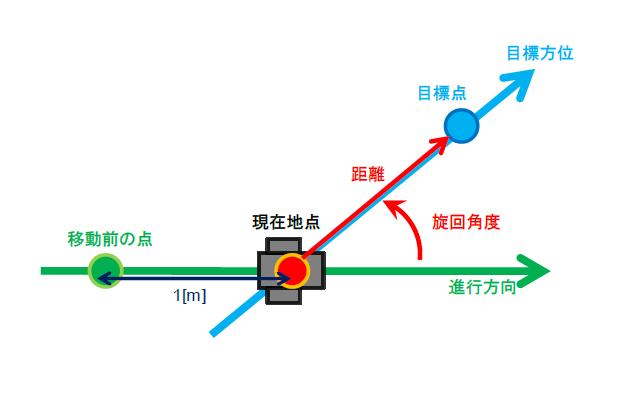
GPSから受信したデータをもとに,ロボットのナビゲーションのために 必要な処理を行うコンポーネントであり,現在地点から目標点への 距離・旋回角度の出力を行います。
・GPSナビゲーションコンポーネントに関する著作権は,芝浦工業 大学ヒューマン・ロボット・インタラクション研究室に帰属します。 ・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での 使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。 なお,本作品を使用して発生した,いかなる損害についても責任を負いません。
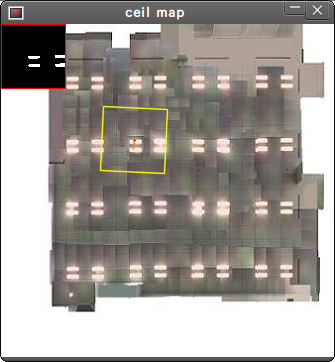
本プログラムはロボットから見える画像と、天井地図のマッチングを常に取ることで自己位置を推定するRTコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.0.0
商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
DFITコンポーネント
概要
DFITコンポーネントは,ロボットの横に装着した2台のカメラから路面
画像を取得,それぞれの路面がどれだけ動いたかを測定し,その
結果より相対的なロボットの自己位置を推定するRTコンポーネント
です。
ライセンス
・DFITコンポーネントの著作権は,芝浦工業大学ヒューマン・
ロボット・インタラクション研究室に帰属します。
但し,IP7000BDを制御するソースコード及びライブラリの著作権は,
開発元の”日立情報制御ソリューションズ”にあります。
・芝浦工業大学水川研究室が著作権を持つRTコンポーネントは,非営利目的での
使用及び改変自由ですが,商用利用の場合は別途ご相談下さい。
なお,本作品を使用して発生した,いかなる損害についても責任を負いません。