
Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
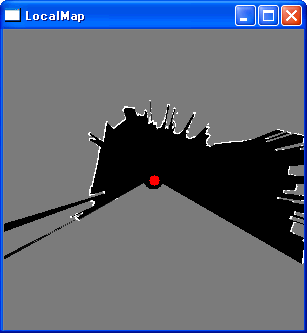
地図情報管理モジュール
概要
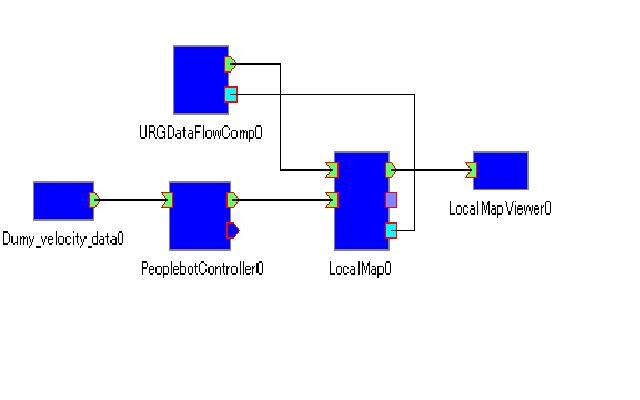
地図情報を基に,ロボットの現在位置と目標位置から経路生成を行うためのモジ ュールです。座標系についてはロボット座標系を用いるが,関連モジュールの「座標変換モジュール」を使用することで,
その他の2 つの座標系(世界測地系,平面直角座標系)に置き換えることが可能である。
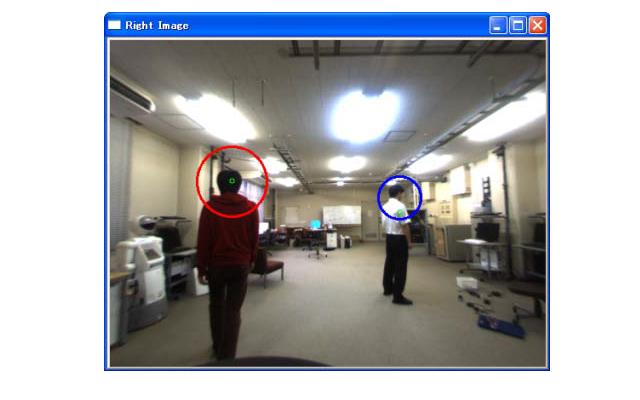
・読み出しマップのGUI表示が可能。
※マニュアルは、ハザードメッシュモジュール、ダイクストラモジュールと共通です。
ライセンス
BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。
連絡先
(特)国際レスキューシステム研究機構
fujinaga@rescuesystem.org
〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階
Tel:078-641-2840 Fax:078-641-2841