


Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
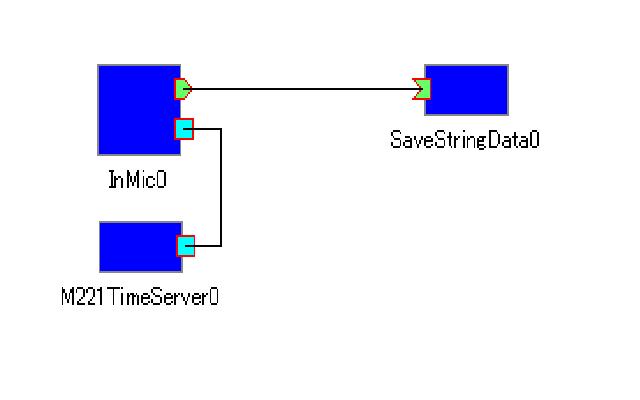
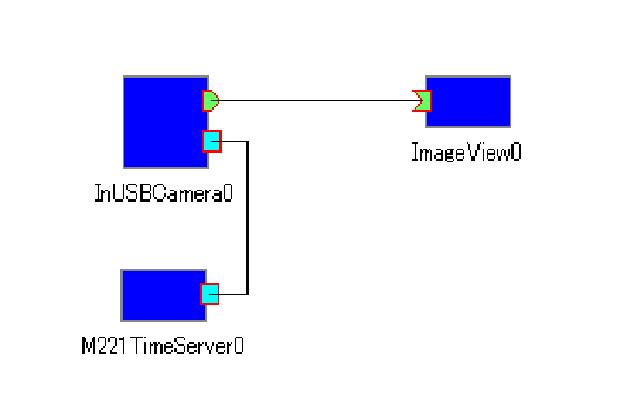
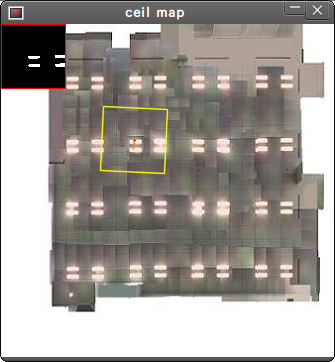
アピアランスベース物体位置・姿勢推定コンポーネント(CPU版)
概要
本コンポーネントは予め取得した画像をモデルとして,アピアランスベースの任意物体の検出及び位置・姿勢の推定を行う。SIFT特徴を用いることで,
日常環境における照明条件の変化や物体の見え方におけるスケール変化,
回転変化に強固な物体検出を実現する。
注意事項
下記ライブラリを使用しています。●OpenCV 1.1
ライセンス
修正BSDライセンスを適用しています。詳しくは、ご連絡をお願い致します。
連絡先
国立大学法人 大阪大学 大学院基礎工学研究科k-oohara@arai-lab.sys.es.osaka-u.ac.jp
〒560-8531 大阪府豊中市待兼山町1-3
Tel: 06-6850-6368, Fax: 06-6850-6341