コンポーネントの使い方はzipファイル内のreadme.txtに記述してあります.
他にもHI-brainホームページには様々なコンポーネントが登録されています. OpenCV関数群を簡単にRTC化する「OpenCV-RTC」や,網膜モデルなど様々な視覚数理モデルRTCが入っているUbuntuインストールディスクなどが提供されています. ※利用時には新規GitHubアカウントの作成を推奨します. ※モデルRTCを簡単に共有可能とするため,GitHubアカウントに登録されたプロジェクトが自動的にHI-brainに読み込まれます.
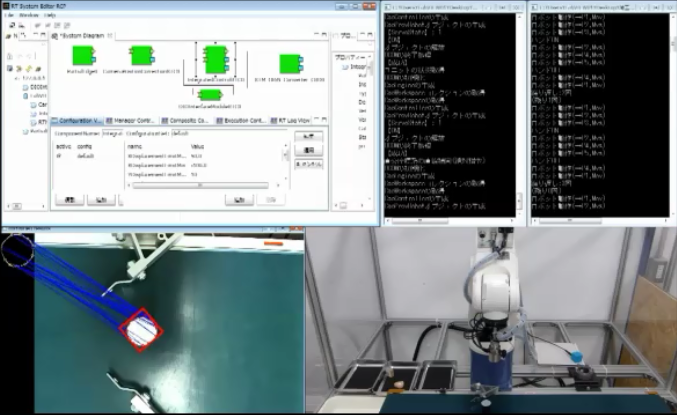
RTMとORiNの連携によって産業用ロボット汎用RTCを開発し、RTMの産業機器用ハードウエアRTCを拡充した.
ロボット動作時の信頼性を高めるRTCを公開する。 また、昨年度のRTMC2013で公開した「写真撮影RTC群」について 実際のデモンストレーションでの動作を通して得た問題点を改善するRTCを公開する。
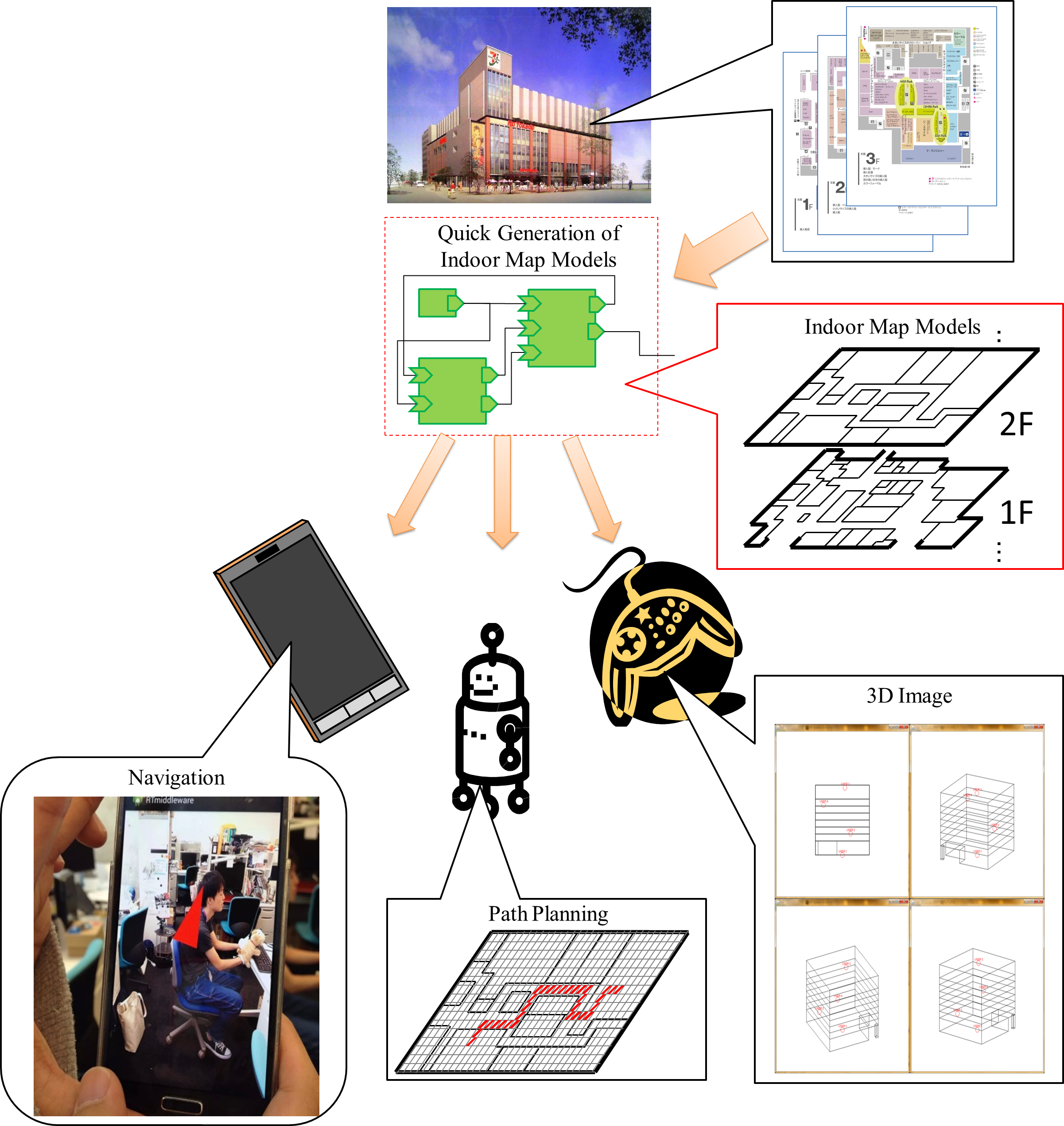
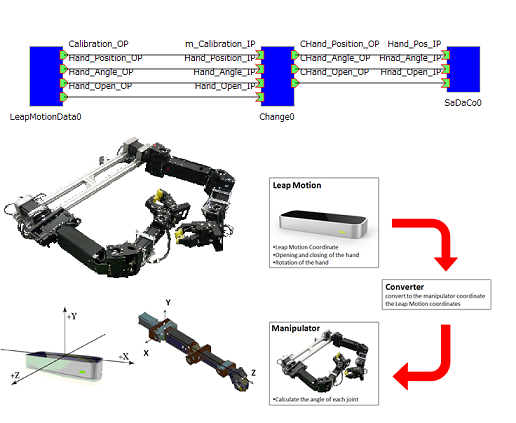
RGB-Dセンサを利用した,ユーザの指差し位置を認識するためのコンポーネントです. 簡便な準備で使用できるようにすることを目標に作成しています. 迅速にキャリブレーションを行い,システムに組み込むことができるようになります.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




オフィスソフトを操作するためのRTC群
概要・特徴
OpenOffice、Microsoft Officeの表計算機能、文書作成機能等をRTミドルウェアを使ったシステムで利用するためのRTコンポーネント群です。