Input device RTCs
音声入力コンポーネントは、マイクより入力された音声データに、 時間情報を付加して出力します。
修正BSDライセンスを適用しています。
株式会社イーガー 新規事業開発部 kubota@mail.eager.co.jp 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel: 06-6360-2050, Fax: 06-6360-2051
SensAble社製のPHANTOM Omniのペン先の位置をOutPortから出力し、InPortへ入力された対象物体からの力情報をPHANTOMへフィードバックする事が可能。
座標系のマッピングや入力された力へのゲインをRTCのConfiguration機能にて変更可能。
地図上でのナビゲーションについて、比較的広範囲なものと狭い範囲のものに分けて開発を行った。広範囲なものとしては、「GoogleMap」と連携しあらかじめ定めておいた経由点を表示するとともに、速度制約領域と呼ばれる領域の入力を可能にした。狭い範囲での走行についてはロボットから送られてくるLRFデータを表示し、その地図上で目的地点と経由点を入力することができる。さらに、狭い範囲での走行については、地図を見ながらロボットに進ませたい方向にiPhoneを傾けることでロボットの目標速度を出力できるようにした。
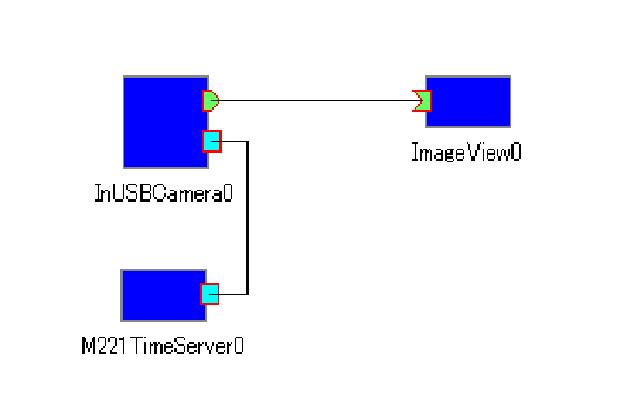
視覚入力コンポーネントは、USBカメラより画像を取得し、取得時間情報を付加して出力します。
下記ライブラリを使用しています。 ●DirectX SDK August 2007 ●Windows SDK Ver.6.0 ●OpenCV2.1(テストコンポーネントにて使用)
OpenRTMによるWiiリモコンからのロボットアームコントロール
UNIX型ジョイスティックデバイス用のRTコンポーネントです。UNIXで使えるジョイスティックならこのコンポーネントで使えます。軸もボタンの数はコンフィグレーションパラメータで選択できます。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


音声入力モジュール
概要
音声入力コンポーネントは、マイクより入力された音声データに、
時間情報を付加して出力します。
ライセンス
修正BSDライセンスを適用しています。
連絡先
株式会社イーガー 新規事業開発部
kubota@mail.eager.co.jp
〒530-0047 大阪府大阪市北区西天満4-14-3
住友生命御堂筋ビル17F
Tel: 06-6360-2050, Fax: 06-6360-2051