本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。 具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して 双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。 システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を 行うための RTC 群で構成される。
双腕ロボットHiroNXに対してOpenRTM経由で動作コマンドを送るためのインタフェースを提供します。
HiroNXInterface使用説明書
LGPL ver.2.1
http://code.google.com/p/hironx-interface
アームの先端にハンドが取り付けられたロボットシステムに対して、把持計画、動作計画、作業計画などを行う、Choreonoidのプラグイン群です。
Choreonoid
graspPlugin for Choreonoid graspPlugin for Choreonoid インストール手順書 双腕ロボットデモ手順書
このコンポーネントは、Basler社製GigEカメラ(aceシリーズ)1台を制御する 機能を有する。
下記ライブラリ、ツールを使用しています。 ●Basler社製 Pylon Driver
Eclipse Public License v1.0を適用しています。
IDEC株式会社 rtc_support@idec.co.jp
ドキュメント/ソースコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
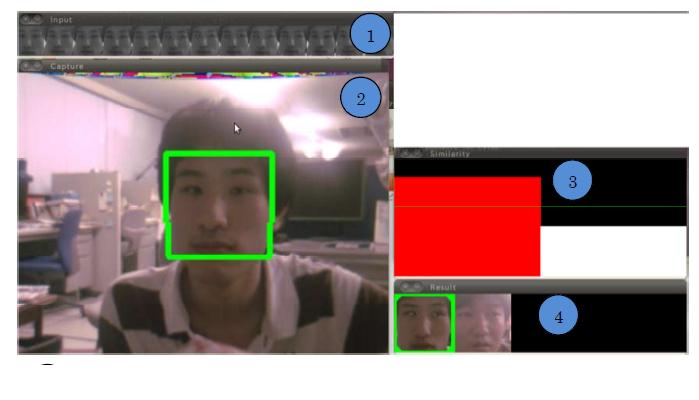
このコンポーネントは、マイクロビジョン社製USBカメラ(MCM-4302)1台を制御する機能を有する。
ドキュメント/ソースコード/バイナリコードは以下のURLから入手できます。 http://code.google.com/p/idec-rtcs/
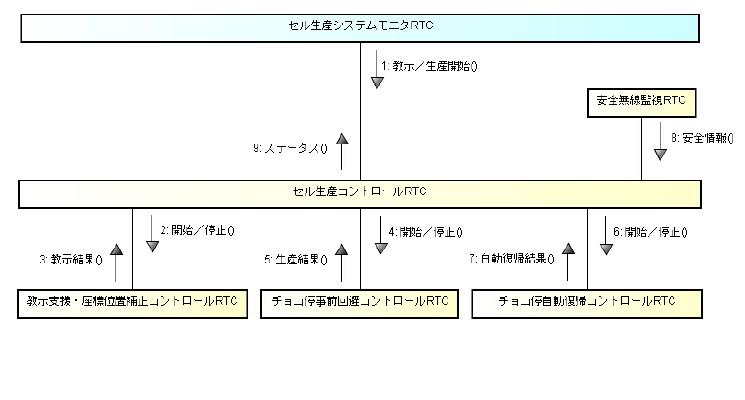
本RTコンポーネントは、ロボット制御セル生産システムの状態(生産中、 教示中、チョコ停中など)を作業者へ表示する機能を有する。
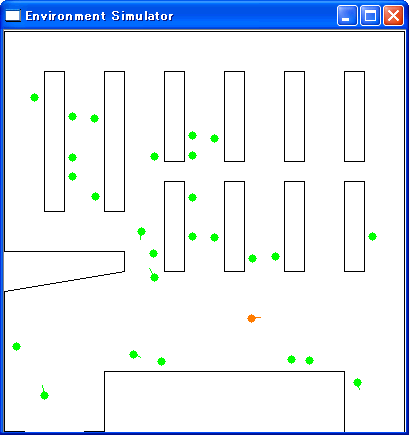
本コンポーネント群はOpenHRP3のシミュレータを用いて、車体速度を入力とする対向二輪型の移動ロボットを経路に沿って走行させる移動機能を統合したモジュール群です。
下記ライブラリを使用しています。 ●OpenCV 2.1.0
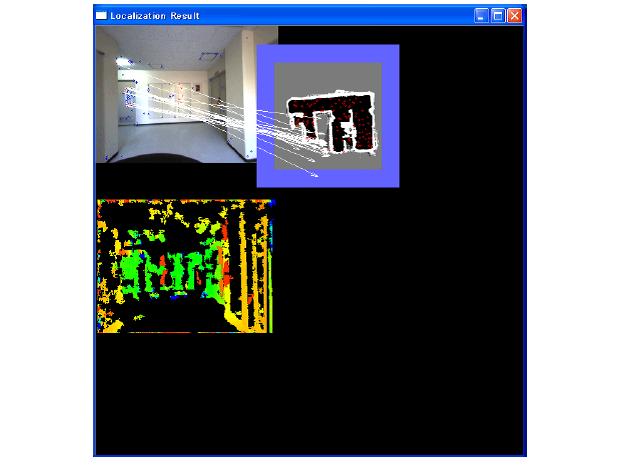
このコンポーネントは、データポートから入力された距離データとロボットの 移動量を用いて大域地図上でのロボット自己位置を推定します。 大域地図(障害物存在確率地図)は、サービスポートからコンポーネント 起動時に受け取ります。
下記ライブラリを使用しています。 ●OpenCV 2.1
修正BSDライセンスを適用しています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク




頭部ステレオカメラを用いた双腕ロボットによるマニピュレーション作業
概要
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。
具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して
双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。
システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を
行うための RTC 群で構成される。