対話型のシステム構築を容易にするために作成したRTコンポーネント群です。ここで公開するRTコンポーネントは、既に、公開されているOpenHRIとともに公開する予定です。
対話型システムのためのRTコンポーネント群として以下のコンポーネントを開発しています。
遅くなりましたが全コンテンツが揃いました.
コミュニケーション用RTCとセンサRTC,Kobuki改良用RTCを提供します.
Android端末を利用し,多言語の音声発話と音声認識機能を利用できます.
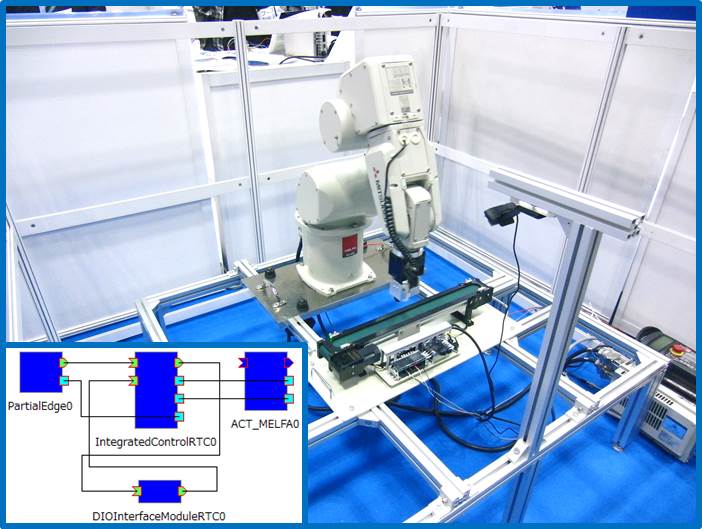
ロボットによる全自動写真撮影サービスを提供する。 汎用的なハードウェアを利用している為再利用が容易で 個々の機能も別のサービスとして活躍が期待できる。
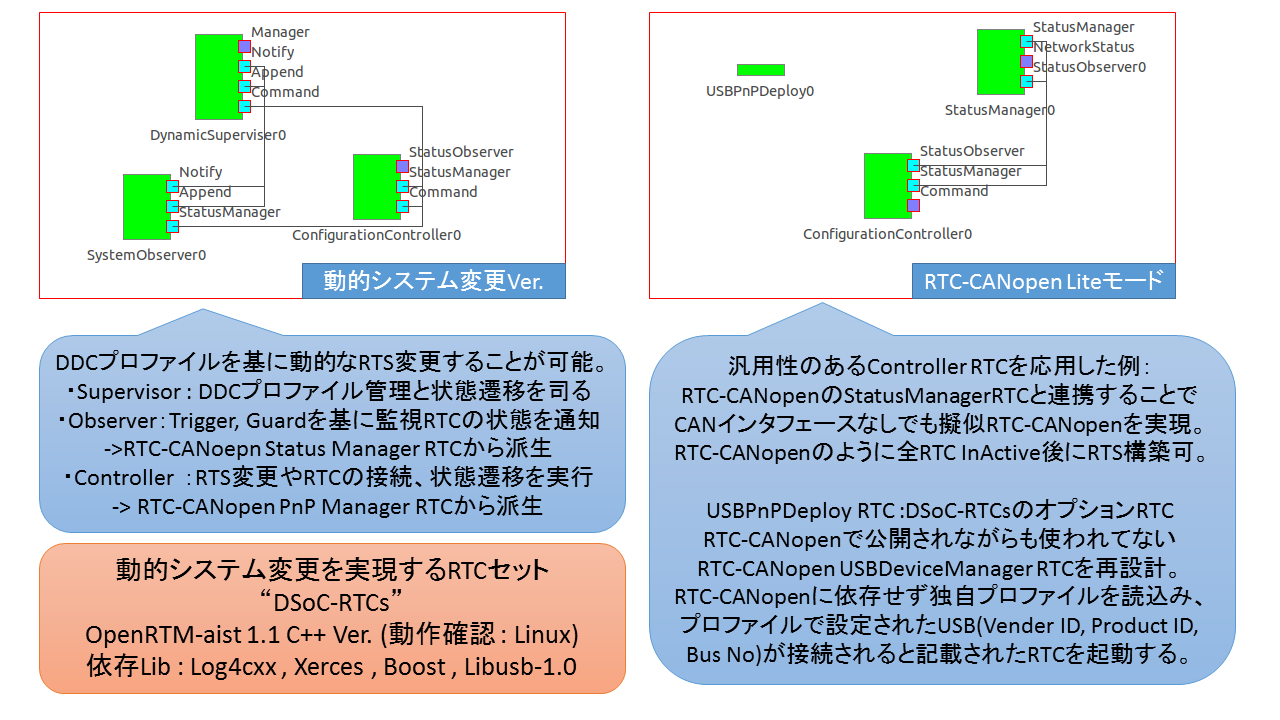
本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です. 例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。 ・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。
本ページはRTミドルウェアコンテスト2013で発表予定のRTCページです。 レーザーレンジファインダを搭載した移動ロボット(Roomba)を用いて、自律的に地図を作るシステムを提供します。 このRTC群は、Kartoライブラリを用いたSLAMや経路計画、自己位置推定などの環境地図RTCと、北陽電気のレーザーレンジファインダ、iRobot社のRoombaを制御するRTCが含まれています。
地図システムのコンポーネント群全体について、再利用性を高めるため、データポートを使用し、標準の構造体を使用して設計・構成しています。 そのため、標準のデータ型を使用すれば、一部RTCを置き換える事も可能です。
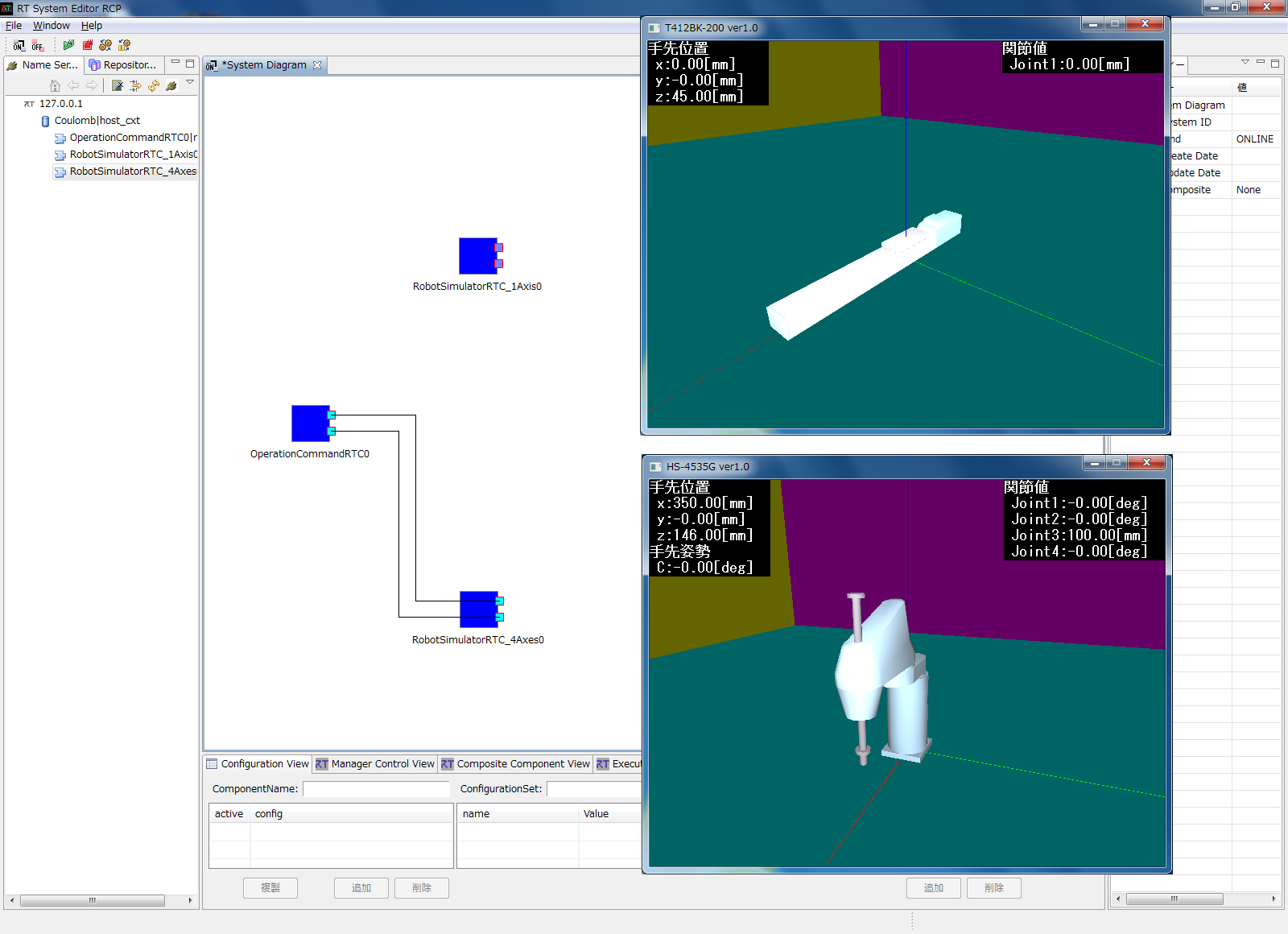
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



RTM on Androidを用いたAndroid用マルチセンサコンポーネント群
概要
特徴