Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
WiiRemote to Robot データ型変換RTC
概要
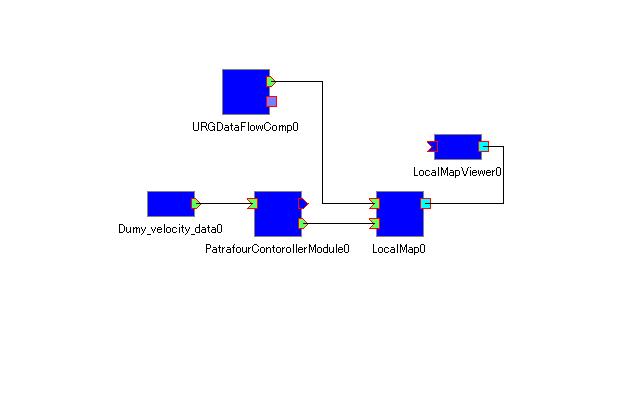
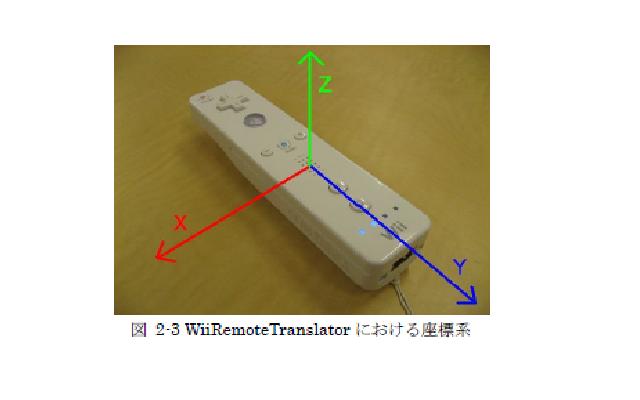
このコンポーネントは芝浦工業大学殿が開発したWiiRemoteComponentsと接続し,Wiiリモコンへのボタン入力をロボットの動作命令に変換します。
これにより,Wiiリモコンによるロボットの制御を可能にします。
ライセンス
修正BSDライセンスを適用しています。連絡先
豊橋技術科学大学 情報・知能工学系〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1
Mail: rtc@aisl.cs.tut.ac.jp
TEL: 0532-44-6826
URL: http://www.aisl.cs.tut.ac.jp/