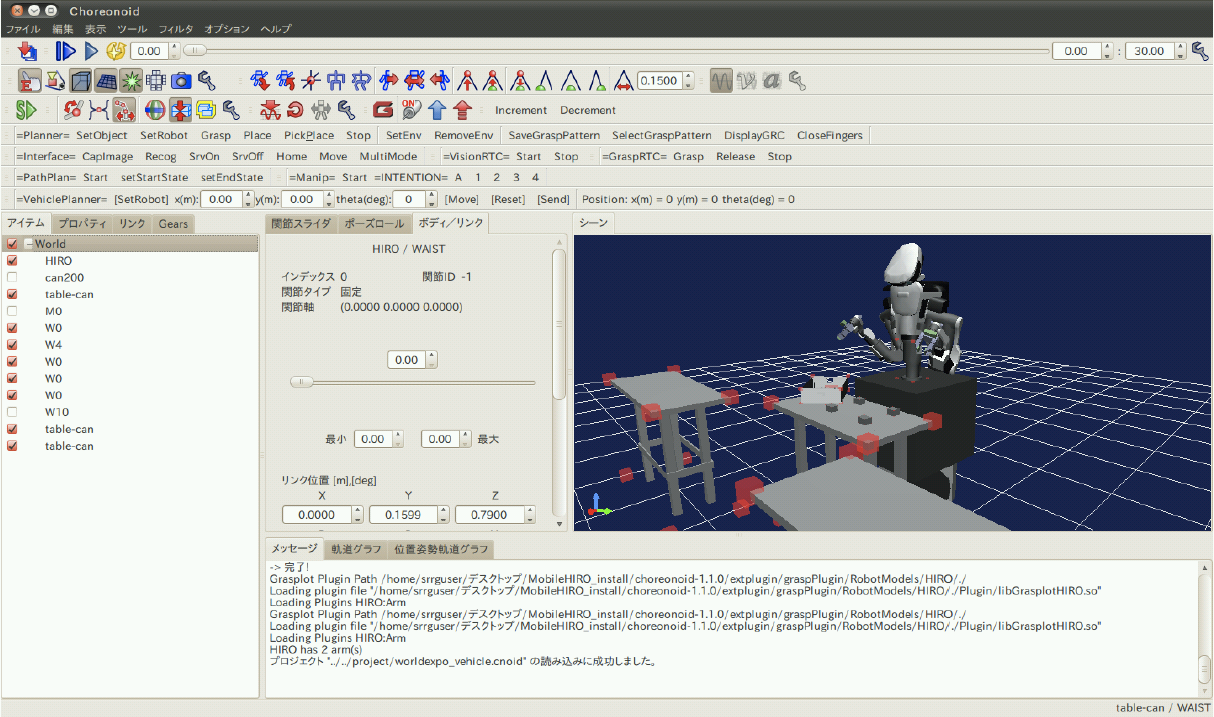
MobileHIRO操作用統合環境は移動型双腕ロボットMobileHIROを実機およびシミュレータ(Choreonoid)上で動作させるための統合環境です。
この統合環境では、移動型双腕ロボットMobileHIROの移動・把持動作の計画作成を行い、計画に基づいた指令を実際のロボットへ送信し作業を行わせることを目的としています。
本システムを利用することで、MobileHIROを以下の2つのステップで運用することが可能となります。
公開準備中
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
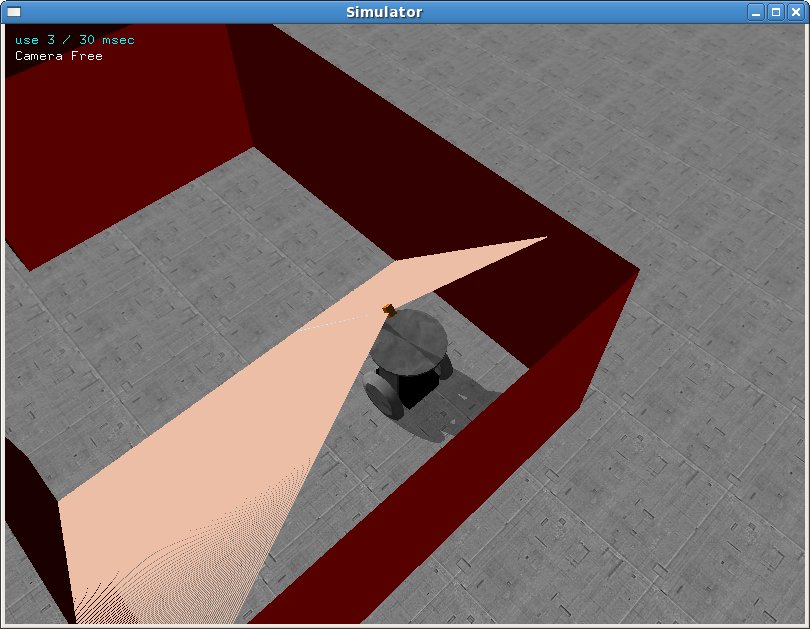
本プログラムはロボットが障害物等に近づき過ぎた時,完全停止(速度0.0(m/sec)) する北陽電機社製UTM-30LX(Top-Urg)対応の緊急停止コンポーネントです。
東京理科大学大学院 理工学研究科 機械工学専攻 溝口研究室 〒278-8510 千葉県野田市山崎2641 Tel:04-7124-150 email:hm@rs.noda.tus.ac.jp, takemura@rs.noda.tus.ac.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
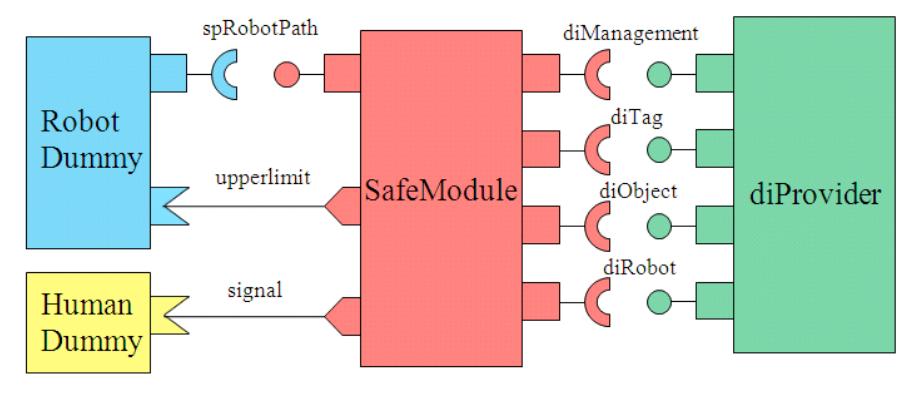
本プログラムは指定されたゴール地点に向かって、ロボットのオドメトリー情報を 基に速度・角速度を制御するコンポーネントです。 Inputポートにゴール地点の情報とロボットのオドメトリー情報を入力します。 Outputポートからはゴール地点の情報とオドメトリー情報から算出された速度指令を 出力します。ゴール地点の情報については、ポートからの入力ではなくプログラム内で 直接指定することも出来ます。 入出力の型は自己定義のTimedVelocity,TimedOdometryなどを使用しています。 ご利用の際はご注意ください。
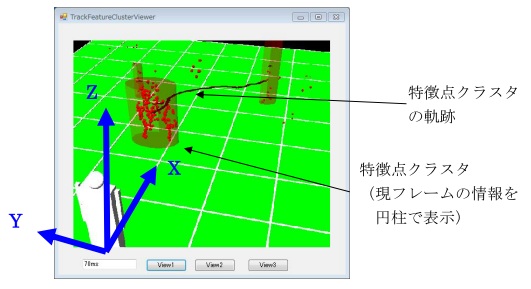
コーナー、エッジの特徴点のクラスタリングを行い そのクラスタの追跡を行なう。 富士通九州ネットワークテクノロジーズより販売している 「ステレオビジョンモジュール」上で動作します。
ステレオビジョンモジュール購入者に無償提供致します。 下記URLのステレオビジョンモジュール ソフトウェア提供依頼フォームよりご依頼ください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
KinectV2用のRTC
概要
特徴
仕様
コンポーネント群