
Download
latest Releases : 2.0.0-RELESE
| 2.0.0-RELESE | Download page |
Number of Projects
| RT-Component | 153.5 |
| RT-Middleware | 35 |
| Tools | 22 |
| Documentation | 2 |
Choreonoid
Motion editor/Dynamics simulator
OpenHRP3
Dynamics simulator
OpenRTP
Integrated Development Platform
AIST RTC collection
RT-Components collection by AIST
TORK
Tokyo Opensource Robotics Association
DAQ-Middleware
Middleware for DAQ (Data Aquisition) by KEK
大局地図への3次元情報追記コンポーネント
概要
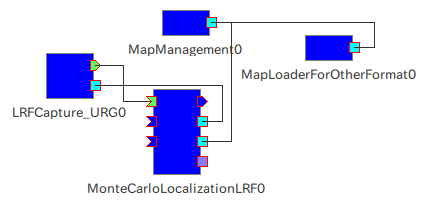
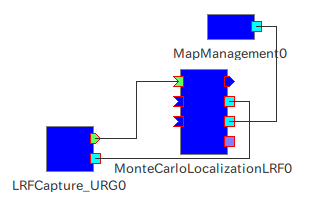
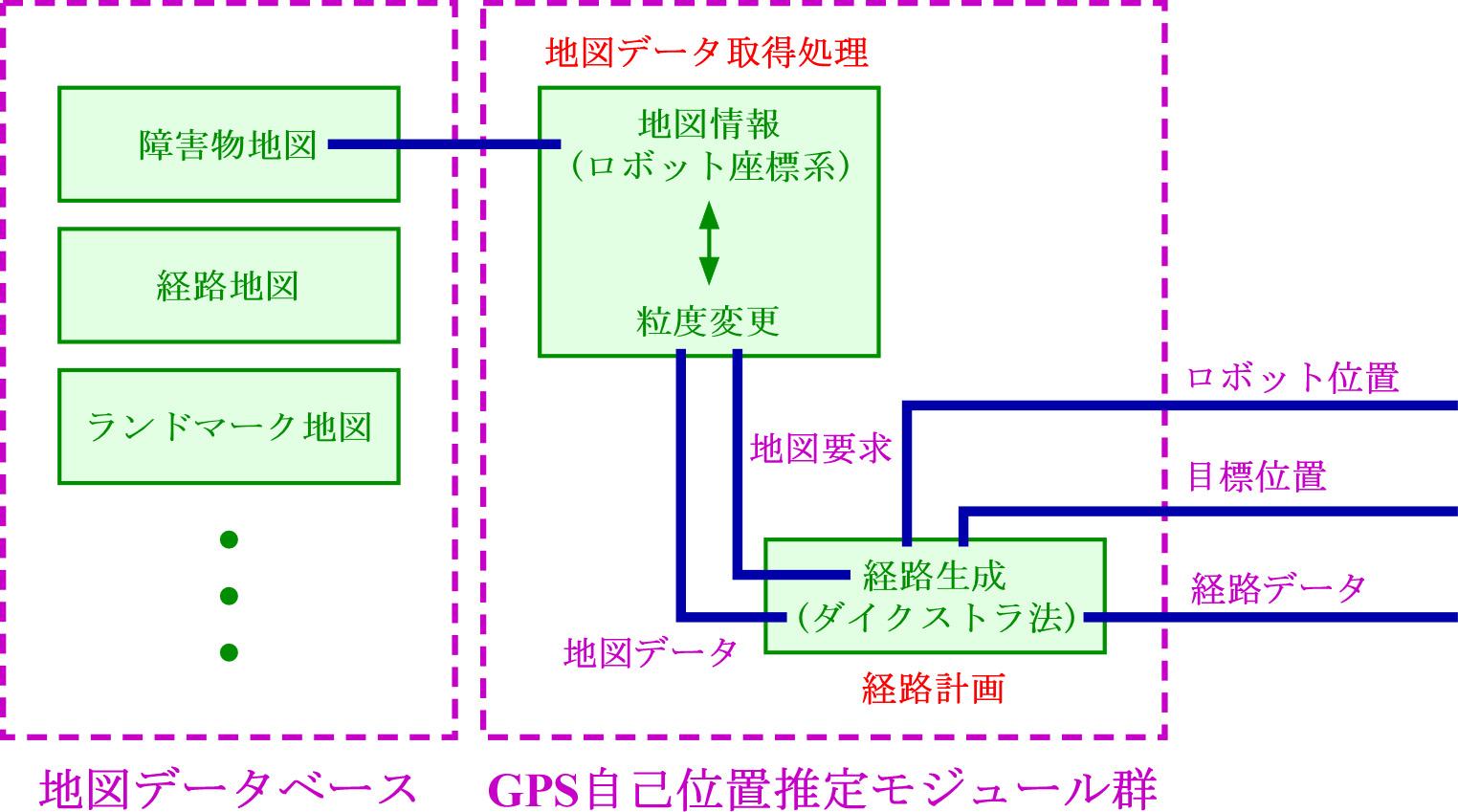
本コンポーネントは,二次元占有格子地図と三次元情報を受け取り,三次元地図への統合・三次元表示を行うコンポーネントです。
注意事項
以下のパッケージの追加インストールが必要になります。●gtk+-2.0
●gtkglext-1.0
●opencv2.0
ライセンス
修正BSDライセンスに基づき配布されます。詳しくは、LICENSE.txtファイルをご覧ください。
連絡先
東京大学 知能機械情報学専攻 情報システム工学研究室itngr@jsk.t.u-tokyo.ac.jp
Download