本プログラムはロボットが障害物等に近づき過ぎた時,完全停止(速度0.0(m/sec)) する北陽電機社製UTM-30LX(Top-Urg)対応の緊急停止コンポーネントです。
修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
東京理科大学大学院 理工学研究科 機械工学専攻 溝口研究室 〒278-8510 千葉県野田市山崎2641 Tel:04-7124-150 email:hm@rs.noda.tus.ac.jp, takemura@rs.noda.tus.ac.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
本プログラムは指定されたゴール地点に向かって、ロボットのオドメトリー情報を 基に速度・角速度を制御するコンポーネントです。 Inputポートにゴール地点の情報とロボットのオドメトリー情報を入力します。 Outputポートからはゴール地点の情報とオドメトリー情報から算出された速度指令を 出力します。ゴール地点の情報については、ポートからの入力ではなくプログラム内で 直接指定することも出来ます。 入出力の型は自己定義のTimedVelocity,TimedOdometryなどを使用しています。 ご利用の際はご注意ください。
LRFのデータを使ってロボットの前に人間がいるかどうかを判断するコンポーネントです.
修正BSDライセンスを適用しています.
3月上旬頃公開予定
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5371, Fax: 0743-72-5379
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
LRFからデータを取得するためのコンポーネントです.
このコンポーネントは静止・移動障害物を回避しながら,指定物体を追う 経路を計画するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
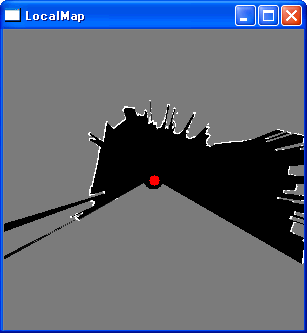
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
Point Cloud Libraryのコンポーネントラッパー群です。ポイントクラウドの生成、処理及び表示をするコンポーネントを提供します。簡単に新しいポイントクラウド処理コンポーネントを作るためのベースクラスも含めています。他のコンポーネントでポイントクラウドのデータ型を使うために、データ型もIDLをライブラリとして提供します。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


圧力計測と音声出力を組み合わせた生活を彩るアプリケーション群の開発