複数台の移動ロボットを対象とした経路計画法の検証用RTC
複数台の移動ロボットを対象とした経路計画法の検証用RTC
投稿日時:
金, 2014-10-31 14:23
概要
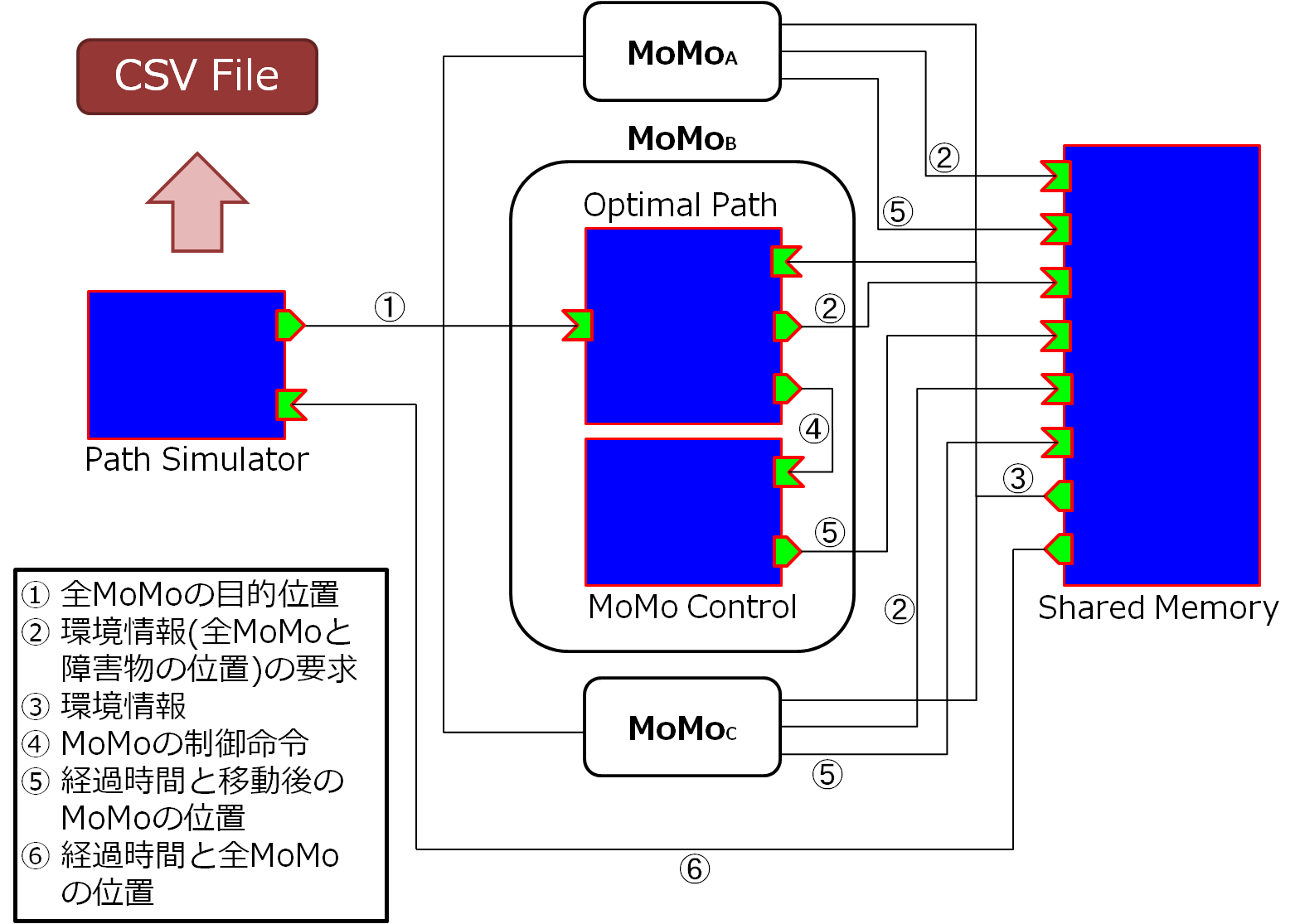
複数台の移動ロボットを対象とした経路計画法が数多く研究されている.これらの経路計画法を実環境において移動ロボットで用いる上で,事前にシミュレーション環境内での検証を行うことは必要不可欠である.そこで本コンポーネントは,複数台の移動ロボットを対象とした経路計画法の検証を支援する.
仕様
- 言語: C++
- OS:Windows 7
- コンパイラ:Visual Studio 2010 Ultimate
- RTミドルウエア(C++):OpenRTM-aist-1.1.0-RELEASE
コンポーネント群
| RTMC_PathSimulator | CSVファイルからロボットの初期位置・目的位置・環境情報(フィールドサイズ・障害物位置)を読み込み,経過時間と移動中のロボットの座標をCSVファイルに出力する | ||
| RTMC_AstarSearch | ロボットの現在位置から目的位置への移動経路をA*アルゴリズムを用いて探索を行う | ||
ダウンロード
コンポーネント(2014/10/31)
問合先(メールアドレス):
is0032xi@ed.ritsumei.ac.jp
最終更新日時:
土, 2014-12-13 17:03
コメント
11/7現在で、1つのコンポーネントしかありません。システム構成やマニュアルなどもないのですが、追加のアップロードはいつ頃でしょうか?