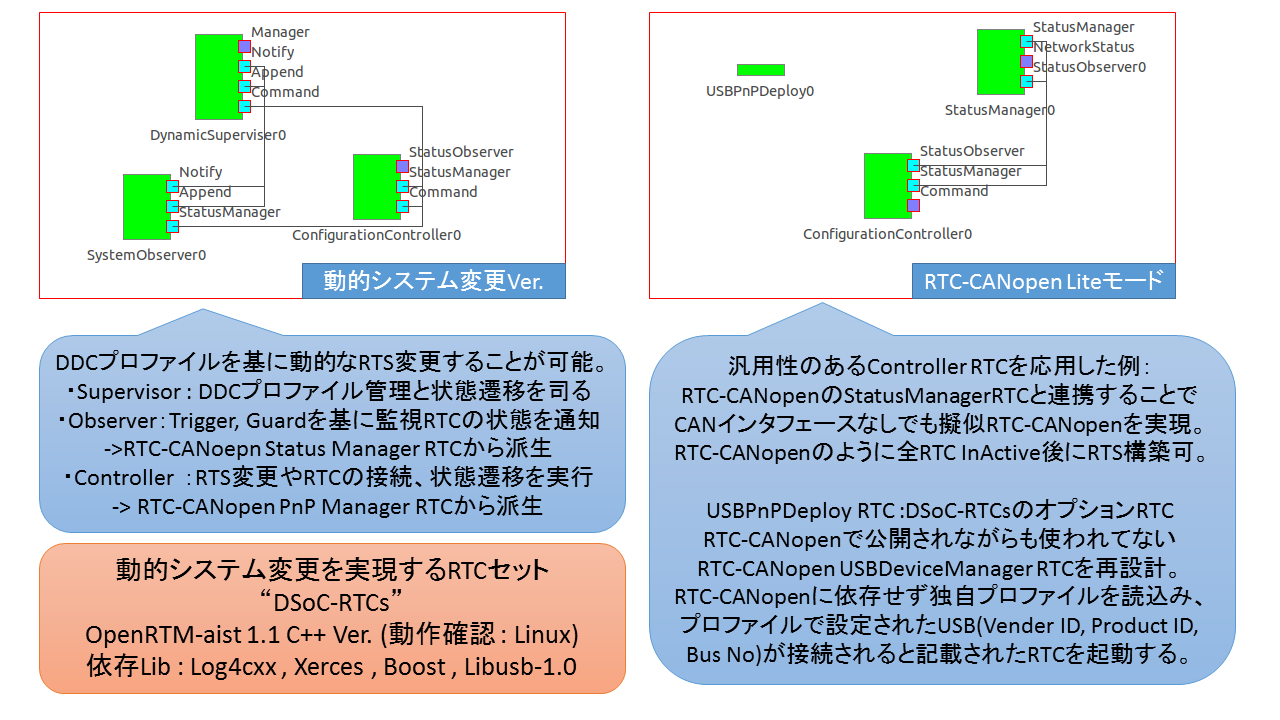
本コンポーネント群は,複数のRTSをステートマシンで管理し,任意のイベントをトリガーとしてRTSの動的変更機能を実装したコンポーネント群です. 例えば,動作する環境(部屋など)をまたいでロボットが動作する場合,その環境に合わせてRTSを変更することが可能です。
・動的システム変更では、DDCプロファイルを読み込み、特定のイベントが発生すると予め決めておいた別のStateへ遷移しRTSを動的に変更することが可能です。現状では、利用するRTCはすべて起動済みの状態のみのサポートです。RTCの動的起動は今後のサポートになります。 ・RTC-CANopen Liteモードでは、従来のCANインターフェースを接続しなくては使用できなかったRTC-RANopenシステムを、CANインターフェースなしで利用できるようにRTC-CANopen依存を排除したRTCです。動的システム変更で用いているController RTCのコンフィグを変更し、RTC-CANopen StatusManagerRTCと連携することで実現しています。
OpenHRIは、音声認識・音声合成・対話制御など、ロボットのコミュニケーション機能の実現に必要な各要素を実現するコンポーネント群です。 フリーで利用できる各オープンソースソフトウェアを使い易いコンポーネントとしてまとめました。
http://openhri.net/
OpenHRIのライセンスは、Eclipse Public License (EPL)です。 http://www.eclipse.org/legal/epl-v10.html EPLは、コードの改変や再配布、営利利用を許可するオープンソースライセンスですが、場合によっては改変内容をライセンス元に開示する必要があります。 OpenHRIが内部で用いているJuliusやOpen JTalkなどのそれぞれのソフトウェアについては、各自のライセンスに従います。
対話型のシステム構築を容易にするために作成したRTコンポーネント群です。ここで公開するRTコンポーネントは、既に、公開されているOpenHRIとともに公開する予定です。
対話型システムのためのRTコンポーネント群として以下のコンポーネントを開発しています。
遅くなりましたが全コンテンツが揃いました.
コミュニケーション用RTCとセンサRTC,Kobuki改良用RTCを提供します.
Android端末を利用し,多言語の音声発話と音声認識機能を利用できます.
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク



ロボットアーム Universal Robots UR5 制御コンポーネント
概要
ポートの説明