音声認識コンポーネントは入力された音声波形データを認識し 文字列で発話内容を出力します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社イーガー 新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田) 〒530-0047 大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F Tel : 06-6360-2050 Fax : 06-6360-2051 E-mail: kubota@mail.eager.co.jp
本システムは双腕ロボットを用いて工場での部品整理をイメージしたサービスを行うシステムである。 具体的には、作業台に置かれた部品を状況に応じて再配置し、個々の部品を検出して 双腕を活かして箱に整理して入れ、双腕で別の場所に運ぶPick&Place作業を行うものである。 システムソフトウェアは頭部ステレオカメラによる部品認識・双腕ロボットでの作業計画・ロボット動作を 行うための RTC 群で構成される。
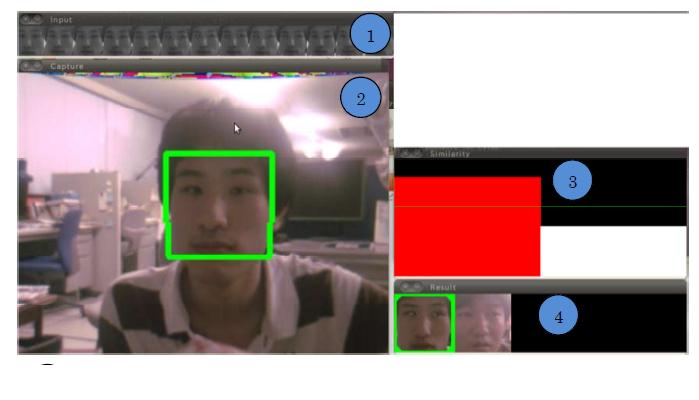
顔動作推定コンポーネントは入力された動画(連続した静止画)から 人物の顔を検出し、顔の向き、視線、目口開閉度を出力します。
下記ライブラリを使用しています。 ●OpenCV 2.1.0
タスクレベルコマンド(菓子Aをトレイの真中へ,等)を 中レベルコマンド(A1点へ移動,ハンドを閉じる,等)へ 書き下して中レベルコンポーネントへ送る
修正BSDライセンスを適用しています.
3月上旬頃公開予定
筑波大学 大学院システム情報工学研究科 aiyama@esys.tsukuba.ac.jp 〒305-8573 茨城県つくば市天王台1-1-1 Tel: 090-3540-5795 FAX: 029-853-6471(専攻事務室)
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクト(HIRO加速案件)の一環として 開発されたことを記し、ここに感謝の意を表する。
市販ゲームパッド用のRTCです。 ボタンON,OFFやスティックの値を出力します。 また、ゲームバッドの操作に合わせて IIS::TimedVelocity形式の速度指令を出力します。
EPL 1.0
千葉工業大学 未来ロボット技術研究センター(furo) http://www.furo.org/ email:info@furo.org
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
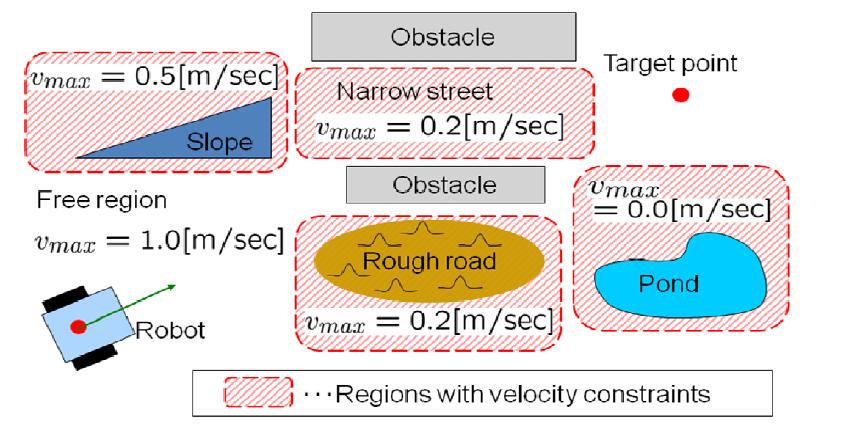
全方位移動搭乗型ロボットを制御するためのコンポーネントです。 主な機能としては、速度指令を入力として搭乗型ロボットをその速度指令通り 走行するように制御します。 また、デットレコリングにより自己位置を出力します。 ドキュメントは、モジュール本体ファイルに含まれています。
・オープンソースにて公開 ・PeakSystem社CAN-USBインターフェースに対応 ・Ubuntu 10.04に対応
移動ロボット用知能モジュール群をオープンソースで公開します。 ドキュメントは、RTモジュールファイル本体に含まれています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


音声認識モジュール(イーガー)
概要
音声認識コンポーネントは入力された音声波形データを認識し
文字列で発話内容を出力します。
ライセンス
商用利用については、実行形式で有償提供とさせて頂きます。
詳しくは、下記までご連絡をお願い致します。
連絡先
株式会社イーガー
新規事業開発部 次世代ロボット知能化プロジェクト(担当:窪田)
〒530-0047
大阪府大阪市北区西天満4-14-3 住友生命御堂筋ビル17F
Tel : 06-6360-2050
Fax : 06-6360-2051
E-mail: kubota@mail.eager.co.jp