RT-Component
複数のデータベースでコンポーネントを管理する、階層型ソフトウェアアーキテクチャで使用されるデータベースノードコンポーネント(DNC)を構築。 DNCによる一括管理でもタスクシーケンスを簡単に変更できる。
Qtの公開条件およびRTミドルウェアの公開条件に準ずる。
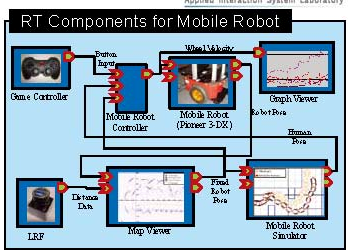
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。
Point Cloud Libraryのコンポーネントラッパー群です。ポイントクラウドの生成、処理及び表示をするコンポーネントを提供します。簡単に新しいポイントクラウド処理コンポーネントを作るためのベースクラスも含めています。他のコンポーネントでポイントクラウドのデータ型を使うために、データ型もIDLをライブラリとして提供します。
拡張現実 (Augmented Reality) システムを容易に実現するためのツールキット:ARToolKit をRTコンポーネント化
様々な入力データに対し、必要に応じた処理を行うことが可能な汎用演算コンポーネント
OpenRTM-aist において定義されるあらゆるデータ型に接続することができるコンポーネントを実現するための基底クラスをオープンスースで公開します。
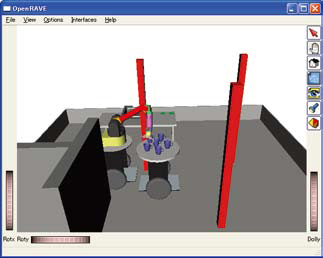
ロボットアームなどのマニュピュレーションを行うオープンソースであるOpenRAVEに機能をRTC経由で利用することができる。
Eclipse Public License - Version 1.0
本システムのご用命やRTコンポーネントの利用 に際しては、右記の連絡先までお問い合わせ ください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク





可変構造階層型ソフトウェアアーキテクチャ
概要
複数のデータベースでコンポーネントを管理する、階層型ソフトウェアアーキテクチャで使用されるデータベースノードコンポーネント(DNC)を構築。
DNCによる一括管理でもタスクシーケンスを簡単に変更できる。
特徴
ライセンス(公開条件)
Qtの公開条件およびRTミドルウェアの公開条件に準ずる。