Mobile robot navigation RTCs
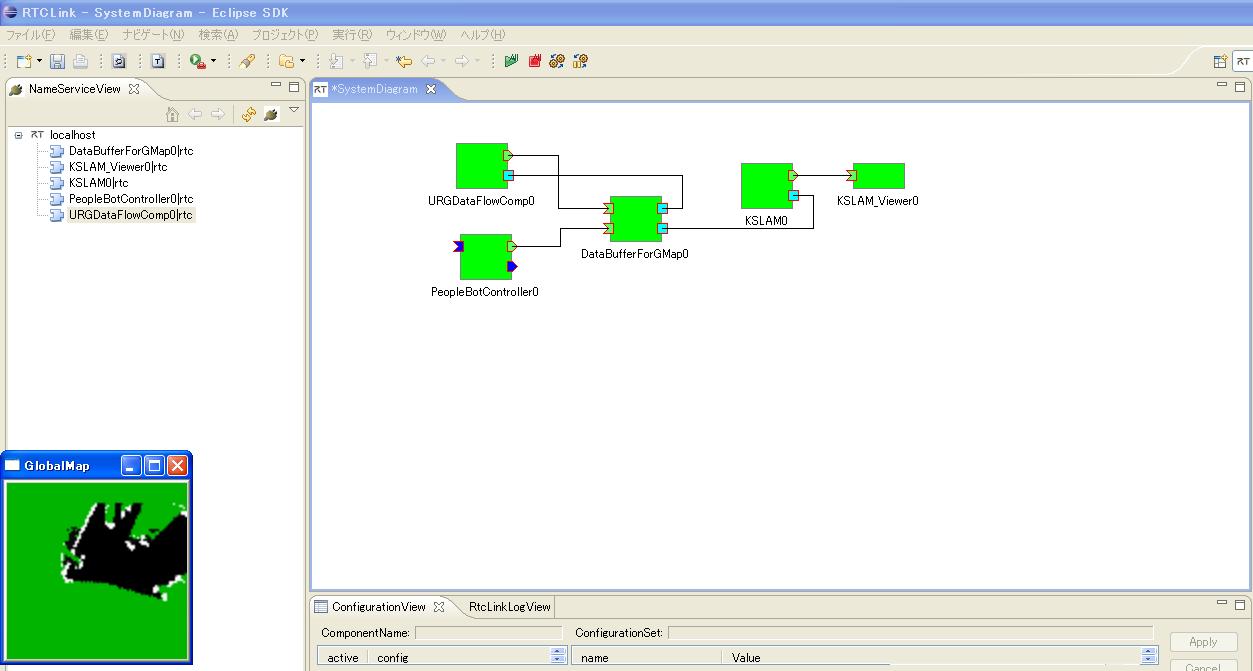
このコンポーネントは、独自手法の大域地図の生成・表示を行うコンポーネント群です。
下記ライブラリを使用しています。 ●OpenRTM1.0.0用では、OpenCV 2.1 ●OpenRTM0.4.x用では、OpenCV 1.0
修正BSDライセンスを適用しています。
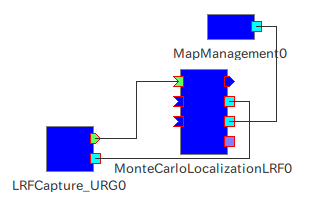
本プログラムは、LRF距離データ,オドメトリ情報を取得し,地図とのマッチングを行うことで 自己位置を推定するRTコンポーネントです。
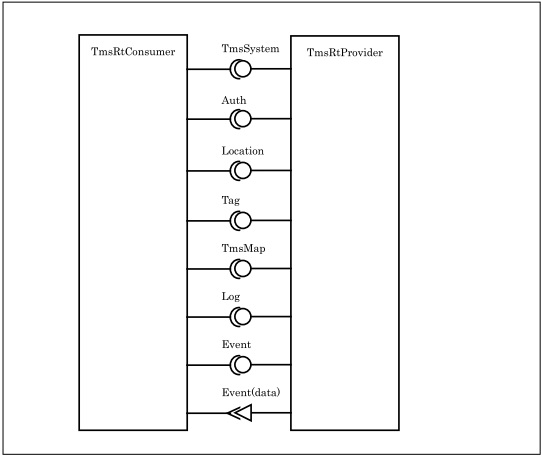
●利用にはタウンマネジメントシステムが必要です。コンポーネントに同梱しております。
BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
(特)国際レスキューシステム研究機構 fujinaga@rescuesystem.org 〒653-0042 神戸市長田区二葉町7-1-18地域人材支援センター1階 Tel:078-641-2840 Fax:078-641-2841 URL:http://www.rescuesystem.org
このコンポーネントは静止・移動障害物を回避しながら,指定物体を追う 経路を計画するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
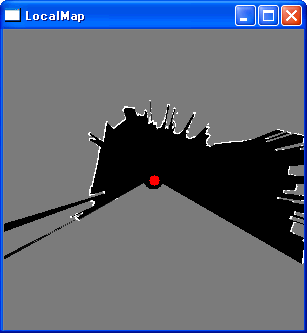
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
ビュートローバーRTCは、OpenRTM-aistを用いたRTコンポーネント開発を学習するための開発キットです。ロボット本体は、USB接続で制御するH8マイコンボードを搭載した台車型ロボット、及びミニノートPCで構成されています。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


Blackship制御RTC (オープンソース)
概要
Blackship 向けの台車モジュールです。速度指示値に対する台車ハードウェアへの速度指示や、制御結果
の速度の出力、台車固有のステータスの出力を行います。
ライセンス
商用以外の利用の場合、修正BSDライセンスが適用されます。商用利用の際には、個別に使用条件を検討させて頂きます。
詳しくは、ご連絡をお願い致します。
連絡先
セグウェイジャパン株式会社E-MAIL robot@segway-japan.co.jp
TEL 045-263-6151
Download