Mobile robot navigation RTCs
地図上でのナビゲーションについて、比較的広範囲なものと狭い範囲のものに分けて開発を行った。広範囲なものとしては、「GoogleMap」と連携しあらかじめ定めておいた経由点を表示するとともに、速度制約領域と呼ばれる領域の入力を可能にした。狭い範囲での走行についてはロボットから送られてくるLRFデータを表示し、その地図上で目的地点と経由点を入力することができる。さらに、狭い範囲での走行については、地図を見ながらロボットに進ませたい方向にiPhoneを傾けることでロボットの目標速度を出力できるようにした。
本コンポーネントはActivateすることによって,UDPでブロードキャストされている環境中のロボットの状況を受信し,接続するロボットを選択することが可能である.接続後はTCPによるソケット通信で目標速度・角速度を送信し,オドメトリの値を受信する.
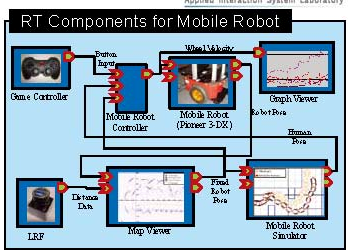
車輪型移動ロボットの開発時に必要な総合開発環境のRTコンポーネント群。移動ロボットを始めて学習・開発を行う人を対象とし、シミュレータにより機器を導入する前から学習を始めることができ、人とのコミュニケーションロボットにおける移動制御モデルの開発を行うことができる。
右図のようにコンポーネント間で必要なデータの入出力を行う。具体的には、制御車輪速度、移動ロボットの推定位置・LRFデータ・人物位置・ポテンシャル法における制御ベクトルなど。
MOBILE ROBOTIS社のAriaライブラリを除き、非商用利用であれば自由に利用可能。
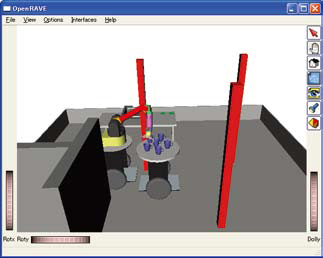
ロボットアームなどのマニュピュレーションを行うオープンソースであるOpenRAVEに機能をRTC経由で利用することができる。
Eclipse Public License - Version 1.0
※ OpenINVENTの開発は、ver4.0.0をもって終了いたしました。
車輪型移動ロボットが自律的に目的地まで移動できるためには、目的地までの経路を計画し、その経路にそって走行するために車輪の回転を制御し、センサを使って周囲の状況を観測し、自身がどこにいるのかを推定するなどの機能をもつRTC群です。
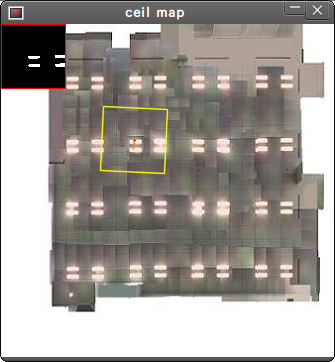
本プログラムはロボットから見える画像と、天井地図のマッチングを常に取ることで自己位置を推定するRTコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 2.0.0
商用以外の利用の場合、BSDライセンスが適用されます。 商用利用の際には、個別に使用条件を検討させて頂きます。 詳しくは、ご連絡をお願い致します。
奈良先端科学技術大学院大学 情報科学研究科 robotics-staff@is.naist.jp 〒630-0192 奈良県 生駒市 高山町 8916-5 Tel: 0743-72-5376, Fax: 0743-72-5379
Stage(ステージ)ロボットシミュレータコンポーネントです。2次元シミュレータで異同ロボットの実験ができます。一つのシミュレータで複数のロボットが使えます。
障害物情報から衝突を判定するコンポーネントです。
- CollisionDetection 障害物検知RTC (OpenRTM-aist 1.0.0-RC1 C++)
・インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
BSDライセンス
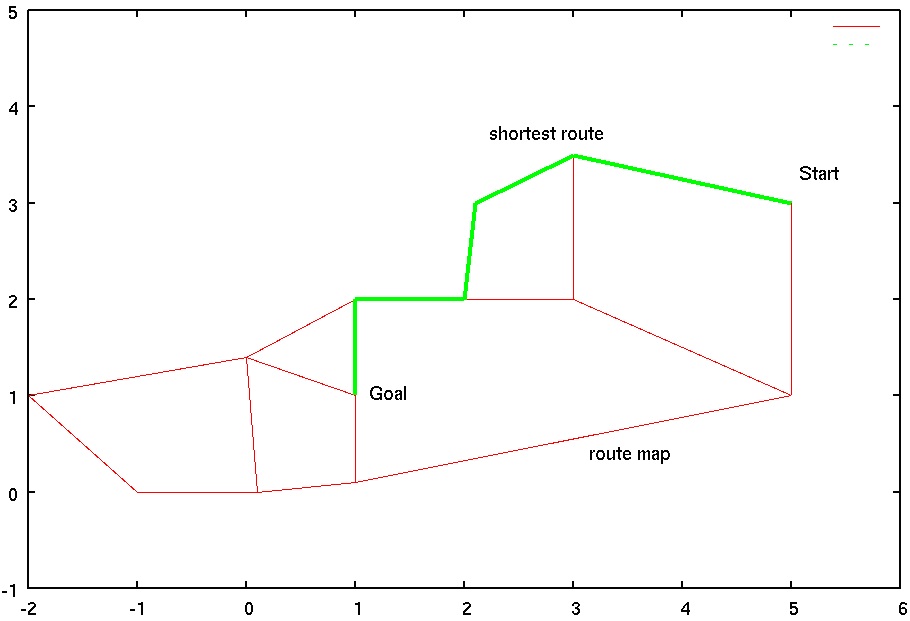
経路地図を用い、現在位置から目標位置までの 最短経路を計算・出力するコンポーネントです。
- PathPlanning 経路計画RTC - PositionInput 目的地入力RTC(デバッグ用) (OpenRTM-aist 1.0.0-RC1 C++)
※インターフェース等は今後インターフェースの共通化作業に伴い変更される可能性があります。
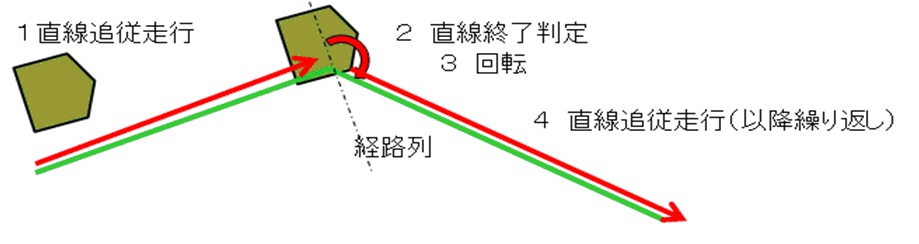
目標経路を追従し経路目的地まで移動するための車体速度情報を出力する自律移動コンポーネントです。
- Navigation 経路走行RTC - PathFollowing 経路追従RTC (OpenRTM-aist 1.0.0-RC1 C++)
BSDライセンス。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク

iPhoneを用いた移動ロボットの地図上ナビゲーション
概要
地図上でのナビゲーションについて、比較的広範囲なものと狭い範囲のものに分けて開発を行った。広範囲なものとしては、「GoogleMap」と連携しあらかじめ定めておいた経由点を表示するとともに、速度制約領域と呼ばれる領域の入力を可能にした。狭い範囲での走行についてはロボットから送られてくるLRFデータを表示し、その地図上で目的地点と経由点を入力することができる。さらに、狭い範囲での走行については、地図を見ながらロボットに進ませたい方向にiPhoneを傾けることでロボットの目標速度を出力できるようにした。
特徴