モデルとして与えられたエッジ情報を手掛かりとして,二次元的に対象物の位置と姿勢,スケールを推定するモジュールです。
window_captcha(ウィンドウキャプチャコンポーネント)
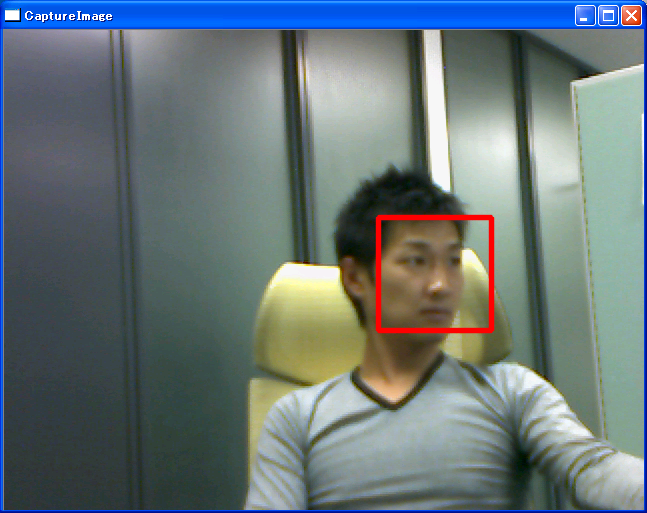
InPortから入力された画像から顔を検出し、入力画像に検出結果を描画した画像をOutPortから出力するとともに、別のOutPortでは、顔の位置や検出した顔の数を出力するコンポーネントです。
ここでは、OpenCVの機能を用いて顔検出を行うRTコンポーネントを紹介します。
利用者が本サイトからダウンロードしたファイルを利用することにより生じたいかなる不具合、故障、損害についても一切責任を負いません。
1.迷路の中に2台の遠隔操縦ロボット 2.2台をそれぞれ操作する(鬼は逃を探す.逃は鬼から逃げる) 3.鬼が逃を捕まえるとGAME OVER ※逃は音を頼りに鬼の接近を把握できる
使用するロボット・カメラ 遠隔操縦ロボット:カメラを搭載し、その映像を見ながらジョイスティックで操縦する 俯瞰カメラ:迷路を上から撮影し、2台のロボットの位置をARマーカーで検出する.2台が近づくと逃にアラート音を出し、2台の間に壁が無くかつ十分に近いとGAME OVERとなる
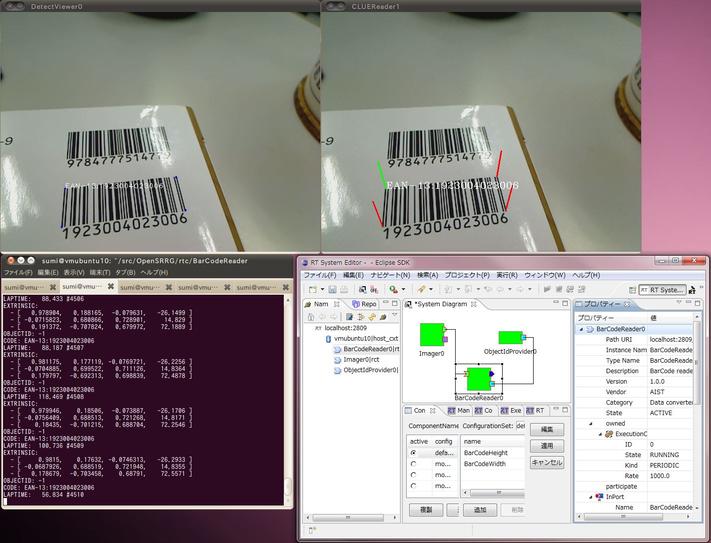
ARToolKitPlusマーカを読み取り、そのIDと位置姿勢(6DOF)を返します。 入力ポートのデータ型はImg::TimedCameraImage 出力ポートのデータ型は要素数20のRTC::TimedDoubleSeqです。
LGPL+個別ライセンスのデュアルライセンス。
ただいま、準備中。しばらくお待ちください。
独立行政法人 産業技術総合研究所 知能システム研究部門 サービスロボティクス研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 Tel/Fax:029-861-3427/029-862-3493 email: srrg@m.aist.go.jp
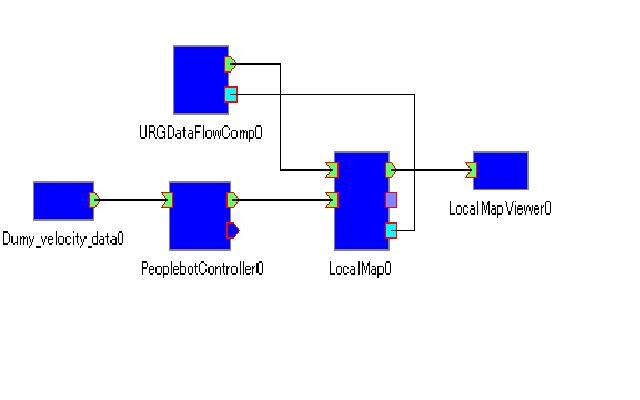
このコンポーネントはMobile Robots 社のロボット用の 制御コンポーネントです。
下記ソフトウェアを使用しています。 ●ZBar-0.10 ●ARToolKitPlus-2.1.5 ●OpenCV-2.0
本コンポーネントの動作環境は、以下のとおりです。 ●画像認識ボード用組込Linux(富士通研究所様ご提供) ●OpenRTM-aist1.0対応画像認識ボード用RTM(セック様ご提供)
修正BSDライセンスを適用しています。 詳しくは、ドキュメントに同梱の"license.pdf"をご覧ください。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク
エッジベース二次元対象物認識モジュール
概要
モデルとして与えられたエッジ情報を手掛かりとして,二次元的に対象物の位置と姿勢,スケールを推定するモジュールです。
ドキュメント