修正BSDライセンスを適用しています。 詳しくは、ご連絡をお願い致します。
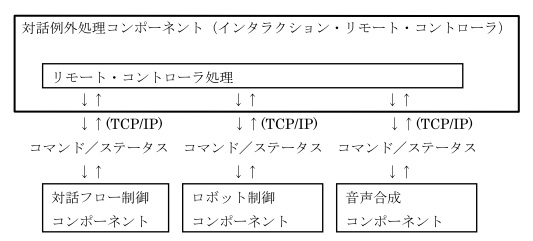
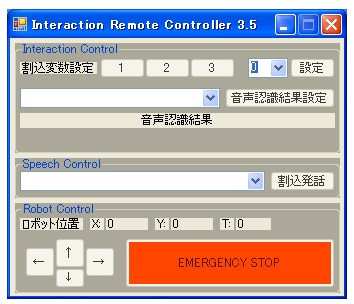
人との対話時に、あらかじめ準備された対話フローに無い例外的な 処理を行いたい場合に、オペレーターが遠隔制御で手動操作するための GUIを持つモジュールで、対話フロー制御RTCや他のRTCモジュールに TCP/IPで接続し、遠隔制御コマンドを出力してロボットを操作します。
商用利用については、実行形式で有償提供とさせて頂きます。 詳しくは、下記までご連絡をお願い致します。
株式会社 国際電気通信基礎研究所 知能ロボティクス研究所 次世代ロボット知能化プロジェクト担当 〒619-0288 京都府相楽群精華町光台2-2-2 URL :http://www.irc.atr.jp/ptRTM/RTM-j.html email:irc-contact@atr.jp
ロボットの機能・用途に応じて予め用意されたコンテンツを管理し 対話者の属性や状況に応じた対話コンテンツを選択・実行する RTコンポーネントです。 特徴1:対話履歴やセンサ等から得られた対話者の属性や情報に応じて 対話の流れを切り替える機能 特徴2:対話コンテンツを管理し、対話の流れをデザインするためのGUI
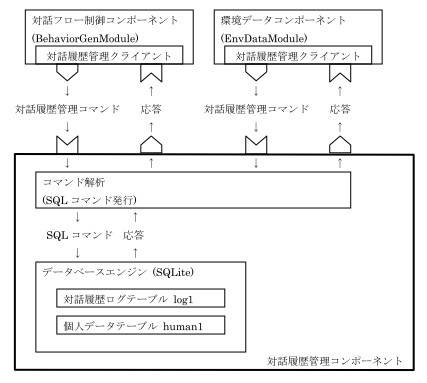
上位層からのコマンドにより、対話履歴データベースを検索・追加・更新・削除し コマンド実行結果を応答として返します。 また、ビヘイビア実行のログを記録する機能があります。
SLAMアルゴリズムを検証する際、実世界で行うのが望ましいが、なんども環境を作り直して実験するのは非常に煩雑である。 また、前の環境に戻戻すことが難しいなどの問題がある。
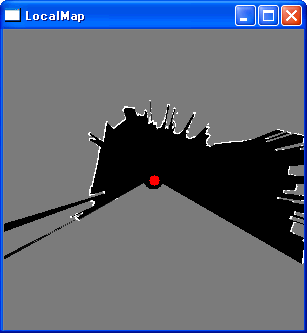
このコンポーネントは距離データとロボットの移動量よりロボット周囲の 障害物存在確率マップを作成するコンポーネントです。
下記ライブラリを使用しています。 ●OpenCV 1.0.0
修正BSDライセンスを適用しています。
豊橋技術科学大学 情報・知能工学系 rtc@aisl.cs.tut.ac.jp 〒441-8580 愛知県豊橋市天伯町雲雀ヶ丘1-1 TEL: 0532-44-6826 URL: http://www.aisl.cs.tut.ac.jp/
動画
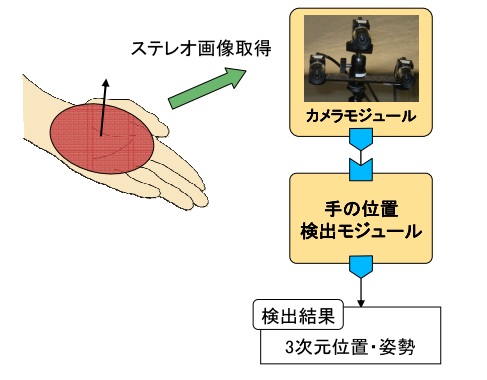
入力されたステレオ画像を処理し、手のひらのような物体を置ける面の 3次元位置と傾きを出力するモジュールです。
実行ファイルを有償でご提供させて頂きます。 詳しくは、下記へご相談ください。
独立行政法人 産業技術総合研究所 知能システム研究部門 タスクビジョン研究グループ 〒 305-8568 茨城県つくば市梅園 1-1-1 中央第二 email:irtsp-vvv@m.aist.go.jp
本システムは、新エネルギー・産業技術総合開発機構(NEDO) 次世代ロボット知能化技術開発プロジェクトの一環として 開発されたことを記し、ここに感謝の意を表する。
工場での部品整理をイメージしたサービス。 具体的には手先のカメラを用いて作業台上の部品を認識し, 両手で箱に整理して入れるサービス。
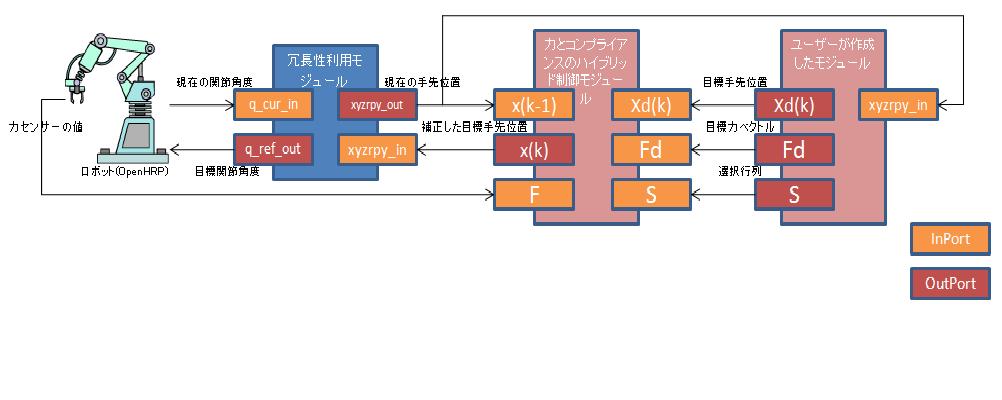
本モジュールは、ロボットのモデル、作業対象物のモデルから運動学を解き、 現在受けている外力から拘束面を推定し、拘束力を一定にしつつ指定された 目標位置にもっとも近くなる目標角度偏差を出力するモジュールです。
モーションエディタ/シミュレータ
動力学シミュレータ
統合開発プラットフォーム
産総研が提供するRTC集
東京オープンソースロボティクス協会
ネットワーク分散環境でデータ収集用ソフトウェアを容易に構築するためのソフトウェア・フレームワーク


対人追従モジュール群
概要
人発見モジュール(LRF),人発見モジュール(stereo camera) からの情報を統合し,移動ロボットに対しての速度,角速度指令を算出するコンポーネント群です。
使用法などについては,解凍後フォルダー内のHumanDetecFusion,
LocalPahPlanning各々のreadme.txtを参照ください。
ライセンス
修正BSDライセンスを適用しています。
詳しくは、ご連絡をお願い致します。